Kołowy transporter opancerzony ROSOMAK

Skarbimierz, Święto Wojska Polskiego 13.08.2023 – 17. Wielkopolska Brygada Zmechanizowana
Fiński pierwowzór
Rosomak to spolonizowana wersja fińskiego transportera opancerzonego Armored Modular Vehicle. Prace nad kołowym wozem bojowym nowej generacji rozpoczęto w fińskiej Patria Vehicles Oy z Hameenlinnie, wchodzącej w skład koncernu Patria Oy, a obecnie Patria Land System Oy, już w połowie lat 90.-tych, XX wieku. Pojazd miał uzupełniać, a z czasem zastąpić używane do tej pory opancerzone pojazdy kołowe i gąsienicowe fińskich sił zbrojnych. Nowy wóz opancerzony uwzględniał wstępne wymagania, sformowane w 1995 roku na podstawie doświadczeń armii fińskiej oraz wniosków z opracowania produkcji i eksploatacji pojazdów Sisu PaSi XA-180 i pochodnych w układzie jednym 6×6, produkowanych przez Partię od 1984 roku.
Konstrukcja nowego transportera opancerzonego miała charakteryzować się modułowością (początkowo planowano koncepcję tzw. wymienianych kontenerów), w związku z tym pojazd AMV (Armored Modular Vehicle). W opracowaniu wozu użyto, po raz pierwszy w Finlandii na taką skalę, procesów komputerowego projektowania zasadniczych elementów, jak i poszczególnych elementów oraz technik symulacyjnych zachowania się poszczególnych podzespołów. Miało to pozwolić na szybsze i bardziej bezproblemowe ukończenie prototypów i przeprowadzenie testów, a także opracowanie wymaganych wariantów pojazdu. Planowano powstanie transporterów w układach jezdnych: 6×6, 8×8 i 10×10, ale z uwagi na wymagania fińskich sił zbrojnych w pierwszej kolejności skupiono się na wariancie czteroosiowym, który po 1996 roku uznano za najlepszy dla zastąpienia XA-180 oraz zmodernizowanych wozów serii XA-185 i XA-200. Fińska armia wymagała jednak zwiększonej ochrony balistycznej i przeciwminowej w stosunku do poprzedników, a także większej ładowności wozu i objętości wnętrza, nieunikniony zatem był wzrost i masy pojazdu, do około 24 000 kg. Podstawowymi typami pojazdów dla Finlandii miały być transporter opancerzony, uzbrojony w karabin maszynowy kalibru 7,62 mm lub 12,7 mm, wóz dowodzenia oraz pojazd do ewakuacji medycznej. Program AMV w 75% był finansowany przez fiński resort obrony, a w pozostałej części przez firmę Patria Vehicles Oy.

Święto Wojska Polskiego – Warszawa, 2018 rok
Filozofia modułowości miała zapewnić dużą podatność na opracowanie wersji specjalistycznych, a także łatwość montażu na AMV coraz cięższych systemów z uzbrojeniem artyleryjskim i rakietowym lub wyposażeniem specjalistycznym. Modułowość konstrukcji AMV przejawia się w kilku aspektach – po pierwsze w możliwości zamontowania wybranego układu napędowego oraz transmisji, kół, systemów wewnętrznych pojazdu, w tym układu klimatyzacji i filtrowentylacji, ochrony przed bronią masowego rażenia; po drugie w prostocie obsługi pojazdu, naprawy uszkodzonych lub wymiany zniszczonych elementów podzespołów oraz po trzecie; w podatności na opracowanie wersji specjalistycznych i łatwości montażu na pojeździe różnych systemów.
W 1999 roku fińska agencja zakupów uzbrojenia FDF (Finlandia forsvarsmakt) sformułowała wymagania taktyczno-techniczne, a projekt techniczny prototypu czteroosiowego (8×8) transportera AMV i badania symulacyjne ukończono w roku następnym. W 2000 roku ujawniono też pierwsze rysunki nowego transportera, a pierwszy prototyp, oznaczony jako XA-360, był gotowy do wstępnych testów w następnym roku. Na pierwszym egzemplarzu testowano wieżę, z armatą automatyczną kalibru 25-30 mm oraz zdalnie sterowane stanowisko strzeleckie. Prototyp z pędnikami wodnymi uczestniczył w testach w Polsce w ramach postępowania przetargowego w sprawie nabycia dla SZ RP tzw. kołowego transportera opancerzonego. Drugi egzemplarz prototypowy ukończono w 2002 roku, nie był przystosowany do pływania. Jeszcze w 2001 roku ministerstwo obrony Finlandii zamówiło kolejne dwa prototypy XA-360 do prób kwalifikacyjnych, niepływający P1 i pływający P2. Przeprowadzono je w latach 2002-2003. Pojazdy zbudowano w wersjach: bojowego wozu piechoty z wieżą OTO-Melara Hitfist-30 i pojazdy rozpoznawczego ze zdalnie sterowanym stanowiskiem strzeleckim Patria PML 127.

Fiński AMV w służbie Chorwacji
Kolejną odmianą transportera bazowego był XA-361 (P3), ze wzmocnionym stropem, który stał się bazą dla samobieżnego moździerza AMOS (Advanced MOrtar System), kalibru 120 mm. AMOS został opracowany przez specjalnie w tym celu powołane szwedzko-fińskie konsorcjum Patria Hagglunds Oy. Porozumienie o wspólnym opracowaniu wysokomobilnego, zautomatyzowanego środka artyleryjskiego wsparcia piechoty zawarto w 1996 roku, ale prace rozpoczęto wcześniej. W trakcie prac koncepcyjnych wybrano opcję zautomatyzowanego autonomicznego modułu wieżowego z dwulufowym moździerzem samoczynnym kalibru 120 mm. Prototyp moździerza oznaczony jako AMOS-M, testowany w 1996 roku, a następnym roku był gotowy pierwszy diopracowany moduł wieżowy AMOS-TD. Dwa prototypy w docelowej kompltacji na podwoziach XA-361 badano w latach 2005-2006. Masa AMOS wynosi 26 00 kg. Tańszą i mniej skomplikowaną alternatywą AMOS-a jest jednolufowy moździerz NEMO (NEw MOrtar), opracowany w latach 2004-2006 przez to samo konsorcjum na bazie AMOS-a i umieszczony również na XA-361. Demonstrator NEMO-TD przeszedł próby w 2006 roku.
W 2005 roku zbudowano także sześciokołową odmianę transportera XC-361P, z kadłubem krótszym o 670 mm o masie bojowej 19 500 kg. Pojazd został zbudowany na zamówienie polskie i miał być prototypem bojowego wozu rozpoznawczego Rosomak-R1(R2). AMV 6×6 był testowany ze zdalnie sterowanym stanowiskiem uzbrojenie, jednak po próbach uznano, jednak po próbach uznano, że nie spełnia on wymagań i pozostał w jednym egzemplarzu. W następnym roku zbudowano kolejny czteroosiowy prototyp, tym razem XA-362, który miał podwyższony o 300 mm przedział roboczy i został skonfigurowany jako maszyna dowódcza-sztabowa z systemami dowodzenia i łączności oraz podnoszonymi masztami antenowi. Pojazd w tej konfiguracji oznaczony SP (System Platform), miał być również bazą dla wersji ewakuacji medycznej o pomocy technicznej. Masa maksymalna tej odmiany AMV wynosi 27 000 kg, w związku z czym nie jest przystosowana do pływania, jednak maksymalną głębokość pokonywanych bród zwiększono do 1,8-2 metrów. W 2006 roku opracowano kolejną wersję XA-360, w tym razem oznaczoną AMV 8x8L. Pojazd ma wydłużony o 350 mm kadłub. Masa maksymalna AMV 8x8L została zwiększona o 26 500 kg.

Użytkownicy wozów AMV
Użytkownicy
Polska była pierwszym krajem, który zdecydował się na nabycie wozów AMV, przy czym odmiana zamówiona przez polskie MON, miała określone modyfikacje zgodnie z wolą kupującego. Wkrótce fiński wytwórca otrzymał kolejne zamówienia.
Finlandia
W 2004 roku armia fińska zamówiła 100 seryjnych pojazdów 8×8 w wersji transportera piechoty, z opcją na kolejne 100 sztuk, ostatecznie zamówienie zmniejszono do 62 egzemplarzy uzbrojonych z zdalnie sterowane stanowisko strzeleckie Konsberg M151 Protector RWS (Remote Weapon Station) z wielkokalibrowym karabinem maszynowym kalibru 12,7 mm. Pojazdy wyposażono w dodatkowe opancerzenie opracowane przez IBD Diesenroth i Akers Krutbruk Protection AB. Wozy zostały dostarczone w latach 2006-2008. Jeszcze w roku 2003 fińskie ministerstwo obrony zawarło porozumienie o dostawie 24 Granatkastarpansarfordon AMOS FIN. Zmniejszono zamówienie złożono dopiero siedem lat później, a seria 18 moździerzy została ostatecznie dostarczona w 2011 roku.

Polska wersja bazowa KTO Rosomak
Słowenia
Kolejnym państwem, które wybrało AMV 8×8 była w 2006 roku Słowenia. Wozy XC-400 otrzymały nazwę SKOV (Srednje Kolesno Oklepno Vozilo) Svarun. Początkowe zamówienie na 123sztuki transporterów w sześciu wersjach i 12 samobieżnych moździerzy AMOS w terminami dostaw dostaw w latach 2008-2012, w 2011 roku zmniejszono do łącznie 30 sztuk. W latach 2009-2011 z zakładów Patrii dostarczono tę partię transporterów opancerzonych ze zdalnie sterowanymi stanowiskami strzeleckimi z wkm kalibru 12,7 mm, kalibru 7,62 mm lub granatnikiem automatycznym kalibru 40 mm. Wszystkie posiadają pojedyncze tylne drzwi. Masa pojazdu wynosi 23 300 kg.
Republika południowej Afryki
W 2007 roku południowoafrykańska firma Denel Land System podpisała z rządową agencją ARMSCOR (Armaments Corporation) umowę w sprawie opracowania pojazdu opancerzonego Badger, który miał zastąpić kołowe transportery opancerzone Ratel. W ramach projektu nawiązano współpracę z Patrią, której AMV 8×8 został protoplastą nowego transportera opancerzonego. W 2010 roku powstał pierwszy prototyp, a w 2013 roku zamówiono ostatecznie 238 Badgerów. Transporter posiada powiększony kadłub, mocniejszy silnik Scania D1 13 o mocy maksymalnej 392 kW (535 KM) i dno kadłuba wzmocniono pakietem opancerzenia opracowanym przez Land Mobility Technologies. Pojazd przystosowano do montażu stanowiska bojowego MCT (Modular Combat Turret), pozwalającego na uzbrojenie go w armatę małokalibrową, moździerz automatyczny lub pociski przeciwpancerne. Wozy w podstawowej wersji posiadają wieżę MCT 30 z armatą kalibru 30 mm i km, kalibru 7,62 mm (zamówiono 135 sztuk), wariant wozu wsparcia posiada wieżę MCT 30 i wyrzutnię przeciwpancernych pocisków kierowanych Ingwe (18 sztuk). Pozostałe odmiany, to: wóz dowodzenia ze zdalnie sterowanym stanowiskiem strzeleckim MCT 12,7 z wielkokalibrowym karabinem maszynowym kalibru 12,7 mm (57 sztuk), samobieżny moździerz automatyczny kalibru 60 mm, z wierzą MCT 60 (36 sztuk) i niszczyciel czołgów z wieżą MCT Missile z przeciwpancernymi pociskami kierowanymi Ingwe (18 sztuk). Pojazdy są dostarczane od 2017 roku, a zakończenie kontraktu jest oszacowane na 2023 rok.
Zjednoczone Emiraty Arabskie
Zjednoczone Emiraty Arabskie (ZEA) w 2007 roku zamówiły pięć pojazdów o wydłużonej wersji AMV 8x8L, z uwagi na możliwy przewóz cięższego uzbrojenia z zachowaniem możliwości przewozu ośmioosobowego desantu piechoty. Wozy te zostały wyposażone w dwuosobową wieżę Bachcza-U z armatą-wyrzutnią kalibru 100 mm, armatą kalibru 30 mm oraz karabinem maszynowym kalibru 7,62 mm. W 2015 roku zostało zamówionych kolejnych 40 AMV 8x8L. Nowe pojazdy mają zmienioną ramę, zmodyfikowane zawieszenie oraz wzmocnione opancerzenie zwiększające ochronę balistyczną do poziomu 3 według STANAG 4569/A, a przeciwminową do poziomu 3B, według STANAG 4569/B. Wszystkie egzemplarze, w wersji ze standardowym kadłubem zostały wyprodukowane w Polsce, a w zakładach Patrii dokonano niezbędnych modyfikacji.
Chorwacja
Również w 2007 roku chorwackie ministerstwo obrony wybrało fiński pojazd jako podstawowy kołowy transporter opancerzony BOV (Borbeno Oklopno Vozilo) dla własnych sił zbrojnych. Początkowo planowano nabyć 126 maszyn (84 pojazdy miały występować w wariancie 8×8, pozostałe 42 w odmianie 6×6), w łącznie 12 wersjach, w tym bojowego wozu piechoty, transportera opancerzonego, wyrzutni przeciwpancernych pocisków kierowanych, moździerza samobieżnego, wozu ewakuacji medycznej oraz pojazdów wsparcia i zabezpieczenia. W 2008 roku zdecydowano ostatecznie o zamówieniu jedynie wersji czteroosiowej 8×8 i ustalono, że liczba zakupionych pojazdów nie zostanie zmniejszona, ale nie zostaną zakupione np. moździerze samobieżne i BOV wyposażone w uzbrojenie rakietowe. Ostatecznie zostało zamówione 126 pojazdów w wersji bojowego wozu piechoty BOV-P30, transportera opancerzonego BOV-P12,7, wozu dowódczego BOV-ZP, pojazdu ewakuacji medycznej BOV-San i wozu zabezpieczenia technicznego BOV-Log. Wozy te są produkowane od 2013 roku w Chorwacji i wyposażone w moduły uzbrojenia: Konsgberg Protector Medium Caliber RWS z armatą automatyczną kalibru 30 mm i karabin maszynowy kalibru 7,62 mm (BOV-P30) oraz Konsgberg M151 Protector RWS w wielkokalibrowy karabin maszynowy kalibru 12,7 mm (BOV-P12,7), a wozy pomocnicze nie są uzbrajane.

12. Brygada Zmechanizowana – zimowe ćwiczenia
Szwecja
Szwedzka agencja zakupów uzbrojenia FWV (Forsvarest materielverk) w 2009 roku zamówiła, w ramach programu Armoured Wheeled Vehicle 2014 (AMV 2014), 113 transporterów opancerzonych AMV 8x8L z wydłużonym kadłubem, a opcją na kolejne 113 egzemplarzy, w czterech wersjach: transportera piechoty Pansarterrangnil 360, wozu dowódczo-sztabowego Stridslendingpansarterrangbil 360, pojazd pomocy technicznej Reparationspansarterrangbil 360 – wszystkie z zdalnie sterowanym stanowiskiem strzeleckim M151 Protector RWS z wielkokalibrowym karabinem maszynowym kalibru 12,7 mm oraz nieuzbrojonego opancerzonego ambulansu Sjuktransportpansarterrangbil 360. Po anulowaniu i następnie powtórzeniu postępowania, w 2010 roku ponownie wybrano fiński pojazd. W latach 2013-2016 dostarczono 79 pojazdów Patgb 360, 16 sztuk StriPatgb 360, 11 pojazdów RepPatgb i 7 wozów SjTpPatgb 360. Wszystkie wozy posiadają hydraulicznie sterowane tylną rampę. Pojazdy posiadają dodatkowe modułowe panele opancerzenia IBD Diesenroth i Akers Krutbruk Protection AB zwiększające ochronę balistyczną do poziomu 4 według STANAG 4569/A i nie pływają, jednak maksymalną zdolność brodzenia zwiększono do 1,8 metrów.
Potencjalne ryki i nowe odmiany
Na bazie AMV 8×8 w 2012 roku powstał prototyp transportera opancerzonego Havoc, który został opracowany przez konsorcjum Patrii i amerykańskiego koncernu Lockheed Martin w ramach programu pojazdu MPC (Marine Personnel Carrier), następcy obecnego amerykańskiego LAV-25, które użytkuje United States Marine Corps.

Ćwiczenia polskiej piechoty zmotoryzowanej
Od 2013 roku AMV 8×8 uczestniczyły w przetargu na 225 kołowych wozów rozpoznawczych CRV (Combat Reconnaissance Vehicle) przeznaczonego dla wojsk lądowych Australii, których zakup ma być finansowany w ramach projektu LAND 400 Phase 2. Zmodyfikowany pojazd ze wzmocnionym zawieszeniem i opancerzeniem oznaczony jako AMV35 8×8 został wyposażony z załogową wieżę BAE System Hagglunds E35 z armatą kalibru 35 mm i karabin maszynowy kalibru 7,62 mm. Wybór CRV ma nastąpić pod koniec 2017 roku, a dostawy mają być realizowane w latach 2020-2024. Poza tym próby fińskiego AMV, były prowadzone w Czechach, Brazylii, Macedonii i Portugalii, a polskiej wersji pojazdu – w Malezji.
W 2013 roku Patria przedstawiła wóz AMV XP będący swoistym następcą klasycznego AMV i przewyższający go częścią parametrów technicznych i taktycznych. Masa tego pojazdu może dochodzić nawet do 32 ton, z czego aż 15 przypada na masę użyteczną. W AMV XP zwiększono nośność, zmodyfikowano zawieszenie, zamontowano większe koła i zastosowano w nim silnik o zwiększonej mocy 450 kW (612 KM).

Kołowy transporter opancerzony KTO Rosomak z wieżą Hitfist-30P.
W 2016 roku Patria ujawniła kolejną głęboko zmodernizowaną wersję pojazdu, oznaczoną jako AMV 28A. Pojazd posiada wydłużony kadłub pozwalający na zamontowanie wieży z cięższym uzbrojeniem i zachowaniem możliwości przewozu ośmioosobowego desantu piechoty. Wprowadzono wzmocniony silnik Scania D1 13 o mocy maksymalnej 392 kW (535 KM). Zastosowano dodatkowe opancerzenie przeciwbalistyczne i przeciwminowe oraz dodatkowe moduły wypornościowe pozwalające na pokonywanie przeszkód wodnych o masie do 28 000 kg. Demonstrator AMV28A został wyposażony w bezzałogowy moduł wieżowy Konsberg Protector MCT-30 (Medium Caliber Turret) z armatą automatyczną kalibru 30 mm i karabin maszynowy kalibru 7,62 mm oraz umieszczonym na stropie wieży zdalnie sterowanym stanowiskiem strzeleckim Konsberg M151 Protector RWS z wielkokalibrowym karabinem maszynowym kalibru 12,7 mm.
Opis techniczny wozów AMV

Transporter transportowy Rosomak-M1M wyposażony w dodatkowy pancerz siatkowy Q-Net patroluje afgańskie miasto Ghazni w 2010 roku
Wszystkie transportery opancerzone AMV, wychodzące z podstawowego fińskiego pojazdu czteroosiowego w układzie 8×8, posiadają ten sam układ konstrukcyjny – kadłub jest posadowiony na tzw. wsporniku układu zawieszenia (ramie), do którego mocowane są inne, główne elementy konstrukcji pojazdu, czyli układy zawieszenia, kół, elementy układu kierowniczego i przekładnie główne. Kadłub pojazdu jest spawany z blach stalowych SSAB Swedish Steel Armox – lub analogicznych – o grubości 8 mm, dających pełną ochronę balistyczną na poziomie 2 według STANAG 4569/A, tj., przeciwko pociskom przeciwpancernym kalibru 7,62 x 39 mm z odległości od 30 metrów. Standardowo AMV jest wyposażony w mocowane dystansowo do kadłuba dodatkowe płyty pancerne o grubości 6 mm (pancerz stylu grodziowego), podwyższającą ochronę balistyczną do poziomu 3 według STANAG 4569/A, przeciwko pociskom przeciwpancernym kalibru 7,62 x 54, z odległości od 30 metrów, ale sama grubość pancerza zewnętrznego jest zależna od danych potrzeb odbiorcy. Tzw. dylatacja powietrzna pomiędzy kadłubem, a pancernymi płytami dodatkowymi może być wyposażona w odpowiedni materiał absorbujący lub zwiększającym wyporność pojazdu. W miejsce dodatkowego pancerza mogą być montowane płyty pancerne – stalowe, o wysokiej twardości – różnej grubości lub panele pancerza specjalnego, ale także lekkie moduły wypornościowe z tworzyw sztucznych lub lekkich elementów aluminiowych. Maksymalnie AMV może dysponować ochroną balistyczną na poziomie 6 według STANAG 4569/A z przodu kadłuba w sektorach +/- 60 stopni, przeciwko pociskom podkalibrowym kalibru 30 x 165 mm z odległości 500 metrów oraz pozostałych w zakresie 4 według STANAG 4569/A przeciwko pociskom przeciwpancernym kalibru 14,5 x 114 mm z odległości od 200 metrów. Wnętrze pojazdu jest wyłożone specjalną wykładziną przeciwodłamkową, którą opracowano na bazie włókna szklanego S2 lub tworzywa sztucznego – polietylenowego – Dyneema. Podwójne dno kadłuba z luką wypełnioną specjalnych tworzywem antyudarowy, ma dawać deklarowaną odporność przeciwminową pojazdu przed eksplozją ładunku o sile wybuchu 8 kg TNT na poziomie 3A według STANAG 4569/B pod którymkolwiek z kół transportera lub ładunku o masie do 6 kg TNT pod dnem, czyli na poziomie 2B według STANAG 4569/B – w tym zakresie ogólny poziom ochrony dna może być powiększony do zakresu 4A według STANAG 4569/B (przeprowadzono próby detonacji ładunku wybuchowego o masie 10 TNT pod kołem transportera AMV 8×8). Dodatkowe możliwości ochronne ma dawać również specjalna konstrukcja sponsonów nad kołami transportera opancerzonego – nie są one zespawane z burtami kadłuba, ale cała boczna część korpusu jest wykonana metodą zginania stalowych płyt AMV jest standardowo wyekwipowany w system ochrony przeciwpożarowej, układ wentylacji i klimatyzacji, system ogrzewania oraz system obrony przed bronią masowego rażenia.
Masa pustego transportera AMV XC-360 wynosiła 16 000 kg, a maksymalna masa bojowa wynosiła 24 000 – 26 000 kg – wskazywała maksymalną nośność podwozia: 10 000 kg. AMV w wersji polskiej miał mieć możliwość transportu lotniczego maszynami klacy C-130 Hercules i pływania przy maksymalnej masie 22 000 kg, spełnieniu tego warunku miały służyć zmiana kształtu bocznych płyt kadłuba, co zmniejszyło szerokość pojazdu o 70 mm, obniżenie poziomu ochrony balistycznej, zmniejszenie zapasu paliwa, wprowadzenie prostych siedzisk desantu zamiast antyudarowych. Z czasem masa użyteczczna różnych wersji AMV została zmniejszona, było to skutkiem przyrostu wagi samego transportera, jak i jego wyposażenia.

Przedział desantu KTO Rosomak z wieża Hitfist-30, starszych wersji
Wnętrze kadłuba jest podzielone na cztery przedziały: silnikowo-transmisyjny, kierowania, bojowy oraz desantowy. Objętość wnętrza wynosi około 13 m3. W podstawowej wersji transportera opancerzonego załoga składa się z dwóch, trzech osób: kierowcy siedzącego z lewej strony przedziału napędowego; dowódcy, który siedzi za nim oraz ewentualnie – mającego siedzisko bezpośredniego za przedziałem silnikowym działonowego – operatora systemów uzbrojenia. Dowódca i działonowy posiadają wieżyczki obserwacyjne z peryskopami, kierowca natomiast otwierany to tyłu właz składanymi szybami do prowadzenia pojazdu przy podniesionym włazem. Przedział roboczo-bojowy może być dowolnie skonfigurowany, jako miejsce przewożenia żołnierzy desantu, miejsce robocze dla operatorów systemów specjalistycznych lub powierzchnia transportowa. Oprócz drzwi w tylnej płycie kadłuba lub hydraulicznie sterowanej rampy tylnej, w stropie tylnej części kadłuba znajdują się również dwa luki ewakuacyjne zamykane otwieranymi w wybranym kierunku klapami. Siedziska żołnierzy desantu są mocowane do burt kadłuba, siedziska dowódcy, działonowego i kierowcy są mocowane do stropu. Mogą to być modele odporne na udary powstałe po wybuchu min lub innych ładunków wybuchowych. Załoga oraz desant piechoty dysponują zestawami przyrządów obserwacyjnych (peryskopy dzienne oraz dzienno-nocne, kamerami obserwacji bezpośredniej otoczenia, znajdującymi się z boków oraz tyłu kadłuba (obraz z tych urządzeń jest przekazywany przez monitory w przedziale desantowym), a kierowca – dodatkowo kamerą cofania.
Pojazdy AMV mogą być wyposażone w dodatkowe systemy dowodzenia i zarządzania polem walki, np. Konsberg Blue Force Protector, urządzenia obserwacyjne, np. zintegrowany system optoelektroniczny Rheinmetall Defence SAS (Defence Situational Awareness System). Pojazd może być wyposażony w dowolne konfigurowane systemy wyposażenia specjalistycznego: urządzenie rozpoznawcze, środki łączności i komunikacji, sprzęt medyczny, inżynieryjny, urządzenia i narzędzia rozpoznawcze i inne.
![]()
stanowisko kierowcy w KTO Rosomak
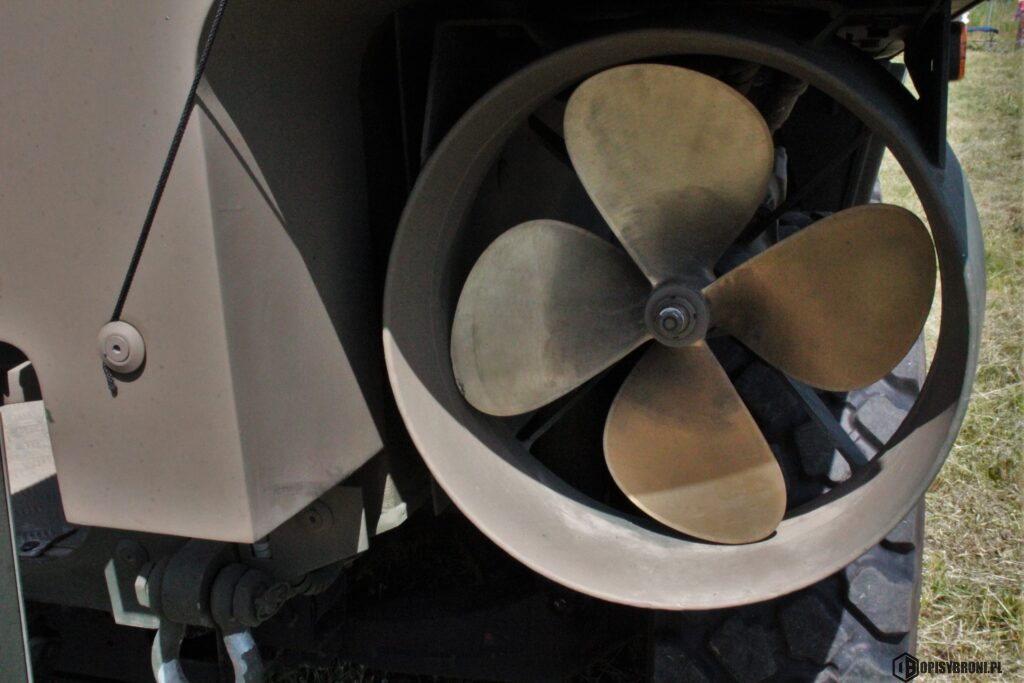
Układ napędowy AMV składa się z silnika wysokoprężnego z układem chłodzenia zblokowanego ze skrzynią biegów z szybko wymiennym power-pack. W podstawowej wersji AMV 8×8 zastosowano sześciocylindrową jednostką napędową Scania serii D1 12 o mocy maksymalnej 360 kW (490 KM), jednak złącza układu power-packa są przystosowane do montażu silników o odpowiednich gabarytach, dysponujących mocą od 260 kW (355 KM), do 450 kW (612 KM). Zastosowana w pojeździe skrzynia biegów ZF 7HP 902 S może być zastąpiona inną przekładnią. Napęd z silnika i automatycznej skrzyni przekładniowej jest przenoszony do skrzyni rozdzielczej Katsa i na przekładnie główne oraz przekładnie piast przy kołach, za pomocą wałów napędowych łączących elementy układu przeniesienia napędu. Zawieszenie niezależne na wahaczach i amortyzatorach hydropneumatycznych. Układ kierowniczy, działający na dwie pierwsze osie, posiada przekładnie mechaniczną ze wspomaganiem, pojazd jest przystosowany do zamontowania systemu skrętu wszystkich kół. Układ hamulcowy z hamulcami tarczowymi sterowanymi hydraulicznie, hamulec postojowy działa na pierwszy oraz czwarty most napędowy. AMV może mieć system ABS (Anti-Lock Braking System) i układ przyhamowania kół jednej z stron, zmniejszające promień skrętu pojazdu przy większych prędkościach jazdy. Koła w rozmiarze 14.00 R20 z oponami z wkładkami run flat posiadają standardowo układ centralnego pompowania kół sterowany automatycznie z czterema ustawieniami ciśnienia, w zależności od podłoża, po którym porusza się wtedy pojazd. AMV 8×8 jest standardowo przystosowany do pływania – napęd w wodzie zapewniają pędniki śrubowe, napędzane hydraulicznie. Zapas wyporności dla masy bojowej 22 800 kg określono na 14,2%, przy okazji prób w Finlandii w 2004 roku zapas pływalności dla masy 21 800 kg wyniósł 28,8%.
Wszystkie transportery opancerzone AMV są uzbrojonymi pojazdami bazowymi, które mogą być wyposażone w zdalnie sterowane stanowiska strzeleckie: Konsberg Protector M151 RWS, Konsberg Protector Lite RWS, Partia PML 127 OWS (Overhead Weapon System), Recon Optical CROWS (Common Remotely Operated Weapon Station), Rafael RCWS-127, Elbit UT-7,62 (ORCWS-7,62), ZM Tarnów ZSMU-1276 Kobuz lub OTO-Melara HITROLE. Moduły mogą być uzbrojone w różne rodzaje i typy środków ogniowych: km kalibru 5,56 lub 7,62 mm, wkm kalibru 12,7 mm albo granatnik maszynowy o kalibrze 40 mm. W wersji bojowej wozu piechoty natomiast są lub będą wyposażone w załogowe lub bezzałogowe systemy wieżowe z automatycznymi armatami małokalibrowymi kalibru 25-40 mm, karabinami maszynowymi kalibru 7,62 mm i wyrzutniami przeciwpancernych pocisków kierowanych – załogowe: OTO-Melara (onecnie koncern Leonardo Finmeccanica); Hitfist-25 oraz Hitfist-30, Denel MCT (Modular Combat Turret), Delco-25 (obecnie General Dynamics European Land System), BAE System Hagglunds E25 i E35 oraz CMI Defence-Cockerill Serier-3000, a także bezzałogowe: OTO-Melara HITFIST OWS (Overhead Weapon System), HSW S.A. ZSSW-30 (Zdalnie Sterowany System Wieżowy), Rafael RCWS-30 Samoson, Elbit UT-30 (ORCWS-25-30) i Konsberg Protector MCT-30. Odrębną gałęzią rozwojową są pojazdy z ciężkim uzbrojeniem. Pierwsza odmiana to wozy wsparcia ogniowego, zwane potocznie niszczycielami czołgów. Firma Patria od samego początku planowała posadowienie na AMV wież z działami średniego kalibru, przeznaczonymi do wsparcia ogniowego pododdziałów lekkich, w tym zwalczania ciężej opancerzonych wozów bojowych. W 2007 roku na podwoziu XA-361 zabudowano wieżę CMI Defence-Cockerill CT-CV 105HP (w Polsce pojazd był znany początkowo jako Rosomak-MSA, a następnie jako Wóz Wsparcia Ogniowego Wilk), oferowane były także pojazdy AMV 8×8 z wieżami: OTO-Melara HITFACT (Highly Integrated Technology Firing Combat Against Tanks) i CMI Defence-Cockerill XC-8 105-120HP lub 3105, w Republice Południowej Afryki opracowano projekt wozu Badger z wieżą LCT 105 (Light Combat Turret), a na AMV 8x8L z wydłużonym kadłubem umieszczono wieżę Bachcza-U. Na wzmocnionych podwoziach klasy AMV są montowane także wieżę z moździerzami automatycznymi: fińskimi AMOS i NEMO oraz polskim MAHSW.

Przedział wariantu medycznego
Rozwój konstrukcji
Wejście do uzbrojenia Sił Zbrojnych RP rodziny bojowych wozów opancerzonych Rosomak w sposób nierozerwalny jest związane z polskim członkostwem w NATO. Jednak już wcześniej, w latach 90. ubiegłego wieku w Ministerstwie Obrony Narodowej opracowano wstępną decyzję o pozyskaniu nowych transporterów opancerzonych o trakcji kołowej. W 1998 roku zapotrzebowanie na nowe wozy zostało określone na 120 sztuk, a we wrześniu tego roku ujawniono opracowane przez wojsko „Wstępne wymagania taktyczno-techniczne na kołowy transporter opancerzony – liniowy”, w którym była mowa o pojeździe kołowym, posiadającym wieżę z armatą automatyczną kalibru 25-30 mm i wyrzutnią przeciwpancernych pocisków kierowanych, zdolnego do przewozu dziesięciu żołnierzy desantu. Plany z 1999 roku zakładały nabycie 410 egzemplarzy pojazdów tego rodzaju do 2012 roku, a łącznie planowano wprowadzenie na uzbrojenie Sił Zbrojnych RP do 1200 sztuk pojazdów opancerzonych w układach jezdnych 6×6 i 8×8 w wersji uzbrojonej oraz odmianach specjalistycznych.
Program NATO
Wraz z wejściem Polski do NATO w marcu 1999 roku, w Ministerstwie Obrony Narodowej zintensyfikowano wysiłki związane z dostosowaniem własnych struktur i wyposażenia SA RP, do wymogów Pakty Północnoatlantyckiego. W tym czasie, również w dowództwie NATO rozpoczęto przygotowania do wdrożenia nowych doktryn działania, sformułowanych na szczycie sojuszu w Madrycie w lipcu 1997 roku i ogłoszonych na spotkaniu w Waszyngtonie w kwietniu 1999 roku. Mówiły one o konieczności rozwoju tzw. Sił Szybkiego Reagowania, do realizacji zadań w sytuacji kryzysowej, na terenie całego globu. Wyraża to przyjęta w Waszyngtonie Inicjatywa Zdolności Obronnych DCI (Defence Capabilities Initiative). W wymiarze stricte militarnym, jednym z elementów projekcji siły miały być zmotoryzowane/zmechanizowane siły średnie (wedle normatywów NATO oddziały lądowe dzieliły się na lekkie, średnie i ciężkie) wyposażone w bojowe wozy opancerzone charakteryzujące się wysoką mobilnością strategiczną i operacyjną, zdolnością do szybkiego przerzutu środkami transporty lądowego, morskiego i lotniczego, w tym średniej wielkości samolotów transportowych. Z tego względu, bazując na wytycznych DCI, w kolejnych latach w państwach sojuszu skupiono się na rozwoju pojazdów kołowych o masie bojowej w przedziale 20-30 ton. Klasycznym rozwiązaniem tej klasy są kołowe transportery opancerzone armii amerykańskiej – Stryker, które stały się zasadniczym wyposażeniem brygad SBCT (Stryker Brigade Combat System).
Wojsko Polskie nie dysponowało wówczas takimi wozami. Wprawdzie jeszcze w latach 80. XX wieku na wyposażeniu Wojska Polskiego znajdowały się ośmiokołowe transportery opancerzone SKOT (Średni Kołowy Opancerzony Transporter 8×8), eksploatowane w kilku wersjach, w tym specjalistycznych, ale dekadę później większość już bardzo mocno wyeksploatowanych wozów zostało wycofanych z linii, a standardowym wyposażeniem jednostek piechoty nadal był BWP-1 (BMP-1), mocno już przestarzałe gąsienicowe bojowe wozy piechoty. Realizując uzgodnione w ramach NATO decyzje, w maju 2000 roku w Polsce przyjęto dokument „Założenia do opracowania Programu przebudowy i modernizacji technicznej Sił Zbrojnych Rzeczypospolitej Polski na lata 2001-2006”, w którym po raz pierwszy formalnie zwrócono uwagę na konieczność wyposażenia jednostek wysokiej gotowości bojowej (zgłoszonych do sił reagowania NATO) w nowe transportery opancerzone lub bojowe wozy piechoty. Zostało to sprecyzowane w jednym z Celów Sił Zbrojnych NATO i Wymagań Długoterminowych, oznaczonych EL 0858 „Zmechanizowane Pojazdy Bojowe”. W maju 2001 roku „Program przebudowy i modernizacji technicznej Sił Zbrojnych Rzeczypospolitej Polskiej na lata 2001-2006” został oficjalnie przyjęty przez Radę Ministrów, a jednym z głównych celów modernizacji technicznej SZ RP było pozyskanie „Kołowych Transporterów Opancerzonych”.



























Bazowa wersja kołowego transportera opancerzonego Rosomak
Autor – zdjęcia: Dawid Kalka
Święto Wojska Polskiego, Piknik Militarny 15.08.2021 – Koziegłowy
Nazwa Kołowy Transporter Opancerzony pierwotnie odnosiła się do programu pojazdu, gdyż wedle obowiązujących wówczas w Wojsku Polskim norm klasyfikacyjnych, w tym „Polskiej Normy PN-V-01002:1999 Sprzęt Pancerny – parametry y wskazania porównawcze, terminologia i kwalifikacja z 1999 roku”, układ jezdny pojazdu nie jest elementem wartościującym. Zgodnie z określeniem normy PN-V-01002:1999 wśród bojowych wozów opancerzonych (BWO) wyróżnia się takie konstrukcje jak: bojowy wóz piechoty (BWP) oraz transporter opancerzony (TO) i niezależnie od tego, czy dany pojazd będzie posiadał koła czy trakcję gąsienicową, o jego kwalifikacji będzie dotyczyło jego główne uzbrojenie. Mimo to obecnie już nazwa Kołowy Transporter Opancerzony j ego skrót KTO weszły do ogólnego obiegu, także w dokumentach oraz instrukcjach.
W programie przebudowy oraz modernizacji technicznej na lata 2001-2006 zapisano pozyskanie 216 pojazdów: 120 w wariancie bojowego wozu piechoty – dla trzech batalionów zmechanizowanych po 40 na każdy – oraz 96 transporterów bazowych (specjalistycznych). Pozwoliło by to na u kompletowanie w KTO jednej Brygady Zmechanizowanej. Łączną wartość ówczesnego zamówienia zostało oszacowane na 1,2 mld PLN w ciągu pięciu lub sześciu lat. Łącznie zapotrzebowanie dla SZ RP na tego typu transportery szacowano na liczbę 1200 wozów w ciągu 10 lat, a następnie na 3100 sztuk. W styczniu 2001 roku rozpoczęto prace rozwojowe Suhak-2, która miała doprowadzić do pozyskania nowego transportera kołowego.

Żołnierze Polscy w Czadzie, II Zmiana PKW Czad
Przetarg na nowy wóz
W sierpniu 2001 roku Departament Zaopatrywania Sił Zbrojnych MON ogłosił przetarg na transportery opancerzone, a zaproszenie do uczestnictwa w postępowaniu otrzymało pięć polskich podmiotów: Huta Stalowa Wola S.A., Ośrodek Badawczo-Rozwojowy Urządzeń Mechanicznych Sp. Z. o. o., Wojskowe Zakłady Mechaniczne, Wojskowe Zakłady Motoryzacyjne Nr 5oraz Zakłady Mechaniczne Bumar-Łabędy. W postępowaniu brano przede wszystkim pod uwagę wozy zagraniczne, których dostawcą miał być podmiot polski – w polskich zakładach została by ulokowana licencyjna produkcja nowego pojazdu. Ostatecznie w listopadzie 2001 roku do postępowania przetargowego na KTO przystąpiły trzy krajowe podmioty, proponujące pojazdy firm zagranicznych, będącym formalnie partnerem przemysłowym polskiej strony postępowania. Były to: Wojskowe Zakłady Mechaniczne S.A., w tandemie z fińską Patria Vehicles Oy, oferującą nowy pojazd XC-360 AMV (Armored Modular Vehicle), Huta Stalowa Wola S.A. z austriackim Steyr-Daimler-Puch AG, producentem transportera Pandur II oraz Ośrodek Badawczo-Rozwojowy Urządzeń Mechanicznych Sp. Z. o. o. wraz z Agencją Rozwoju Przemysłu i Przedsiębiorstwem Handlu Zagranicznego Bumar Sp. Z. o. o., z wozem Piranha IIIC, proponowanym przez konsorcjum firm General Motors of Canadia/MOWAG, MOWAG AG. Wszystkie te wozy zostały przekazane oficjalnie do prób w kwietniu 2002 roku – XC-360 miał być testowany z wieżą Delco Defence (obecnie General Dynamics European Land System) z armatą KBA kaliber 25 mm i Otobreda (obecnie Leonardo-Finmeccanica) Hitfist-25 z tą samą armatą, Pandur II z modułem Steyr SP30 z działkiem kalibru 30 mm, a Pirahnia III z dodatkowym systemem Rheinmetall-KUKA E9 z armatą kalibru 30 mm. Jeszcze w tym samym miesiącu rozpoczęły się pierwsze testy poligonowe konkurencyjnych konstrukcji, w tym strzelanie z wież – nie przewidywano strzelanie z przeciwpancernych pocisków kierowanych, które miały być przeprowadzone przy wykorzystaniu konkretnej rakiety po jej wyborze w trwającym od sierpnia 2001 roku odrębnym postępowaniem przetargowym (żadna z testowanych wież nie była zintegrowana z przeciwpancernych pocisków kierowanych). Próby AMV przeprowadzono – jako ostatniego – w czerwcu, a po zakończeniu części badań w Polsce pojazd Patrii wrócił do Finlandii, gdzie zamontowano na nim pędniki śrubowe oraz falochron. We wrześniu tego roku AMV 8×8 został zaprezentowany z bezzałogowym stanowiskiem strzeleckim Patria PML 127 OWS, który był uzbrojony w wielkokalibrowy karabin maszynowy NSW-T, kalibru 12,7 mm, przeszedł również uzupełniające próby w zakresie pływania. W tym czasie również mieniono wymagania w zakresie konstrukcji wieży i uzbrojenia – pojazd miał być uzbrojony w dwuosobowy moduł z armatą kalibru 30 mm, w związku z tym wybór miał być dokonany spośród konstrukcji Steyr, Delco lub OTO-Melara Hitfist-30.
Jednocześnie, jeszcze w grudniu 2001 roku, po ostatecznym doprecyzowaniu założeń taktyczno-technicznych, w tym zakresie uzbrojenia odmiany bojowego wozu piechoty, oczekiwane zamówienie rozszerzono aż do 690 pojazdów, dla 10 batalionów piechoty zmotoryzowanej, określony termin dostaw na lata 2004-2008, w tym terminie miało być dostarczone kolejne 400 sztuk wozów. Przedmiotem pięcioletniego zamówienia miało być 658 pojazdów w układzie jezdnym 8×8, w tym 313 w wersji bojowego wozu piechoty z wieżą uzbrojoną w 30 mm armatę automatyczną i opcjonalnie systemem przeciwpancernych pocisków kierowanych, określany w dokumentach jako „KTO-bojowy), 345 pojazdów bazowych, nazywanych „KTO-bazowy”, pod zabudowy specjalistyczne, w tym z zdalnie sterowanym stanowiskiem strzeleckim, z wkm kalibrem 12,7 mm oraz 32 bojowe wozy rozpoznawcze w układzie jezdnym 6×6 z wkm kalibru 12,7 mm. Środki finansowe przeznaczone na ten cel miały wynieść 5,3 mld PLN, co dawałoby roczny wydatek z budżetu MON na poziomie 600 mln PLN. Co istotne, w zasadniczym planie finansowym nie przewidywano środków na logistykę i obsługę bieżącą pojazdów oraz kosztów wyposażenia odmian specjalistycznych, te miały zostać określone później. Poszukiwane pojazdy w odmianach podstawowych powinny posiadać możliwość przewożenia pełnej ośmioosobowej drużyny piechoty, zdolność do pokonywania przeszkód wodnych wpław oraz wymiary pozwalające na transport lotniczy w ładowni samolotu transportowego C-130 Hercules.

Przedział desantowy – spieszenie desantu, dla wielu polskich żołnierzy takie opuszczenie przedziału desantowego jest mocno uciążliwe, bardzo często siadają od tego kolana żołnierzy – wiem to z prywatnych rozmów, brak rampy niestety jest wadą wozu
Tym samym, nastąpiły wówczas zasadnicze zmiany w programie kołowego transportera opancerzonego, determinujące przyszłość projektu: skorygowano zasadnicze wymagania taktyczno-techniczne dla pojazdu, zwiększające także ich ilość planowanych do pozyskania wozów. Pierwsza zmiana była zgodna z dyrektywą sojuszniczą i wpisywała się w plan przebudowy i modernizacji technicznej SZ RP, wątpliwość budziła druga zmiana – początkowo program KTO był związany ze zamiarem wyekwipowania w wozy bojowe o trakcji kołowej jednej brygady zmechanizowanej, która spełniała by rolę jednostki szybkiego reagowania w ramach NATO, ale w 2002 roku w nowe wozy planowano przezbroić kolejne dwie brygady. Wprowadzono inne zmiany – zamiast wprowadzania na uzbrojenie wozów wyposażonych w moduły uzbrojenia z wkm kalibru 12,7 mm, planowano pozyskać większą ilość wozów wyposażonych w wieżę z armatą kalibru 30 mm, z opcjonalnym zarządzeniem montażu wyrzutni przeciwpancernych pocisków kierowanych na wieży, czyli dysponującą wielokrotnie większą siłą ognia, ale jednak także droższego w zakupie i dalszej eksploatacji. Połączenie pierwotnych wymagań zbieżnych z wymogami NATO (bojowy wóz opancerzony w układzie 8×8, predysponował w działaniach rajdowych zgodnie z ideą SBCT), z wymogami krajowymi (silnie uzbrojony w armatę automatyczną, przeciwpancernych pocisków kierowanych oraz posiadać możliwość pływania), co odbiło się znacząco na niektórych parametrach technicznych konstrukcji (zmniejsza ochrona balistyczna pancerza oraz szybsze zużycie niektórych elementów zawieszenia oraz napędowych.
Ostateczne oferty, wraz z zobowiązaniami offsetowymi, które jednak nie były brane pod uwagę w ocenę propozycji, trzy konkurencyjne konsorcja złożyły ofertę w listopadzie 2002 roku. W grudniu ostatecznego zwycięzcę ogłoszono Wojskowe Zakłady Mechaniczne S.A., będącego krajowym partnerem fińskiego koncernu Patria. Wybrany pojazd został ostatecznie zaoferowany w odmianie bwp z zamontowaną wieżą OTO-Melara – Hitfist-30 z armatą kalibru 30 mm. Głównym kryterium wyboru była najniższa cena za pojazdy, która została określona na 4,925 mld PLN. Wybór transportera AMV pod koniec 2002 roku i na początku następnego roku wzbudził spore kontrowersje – sugerowano się faktem, że wówczas była to całkowicie nowa konstrukcja, nie eksploatowana przez żadne siły zbrojne. Podnoszono, że istniały wówczas tylko dwa niedopracowane prototypy AMV. Pojazd ten stał się przedstawicielem swoistej „nagonki” medialnej, która trwała do końca 2007 roku.

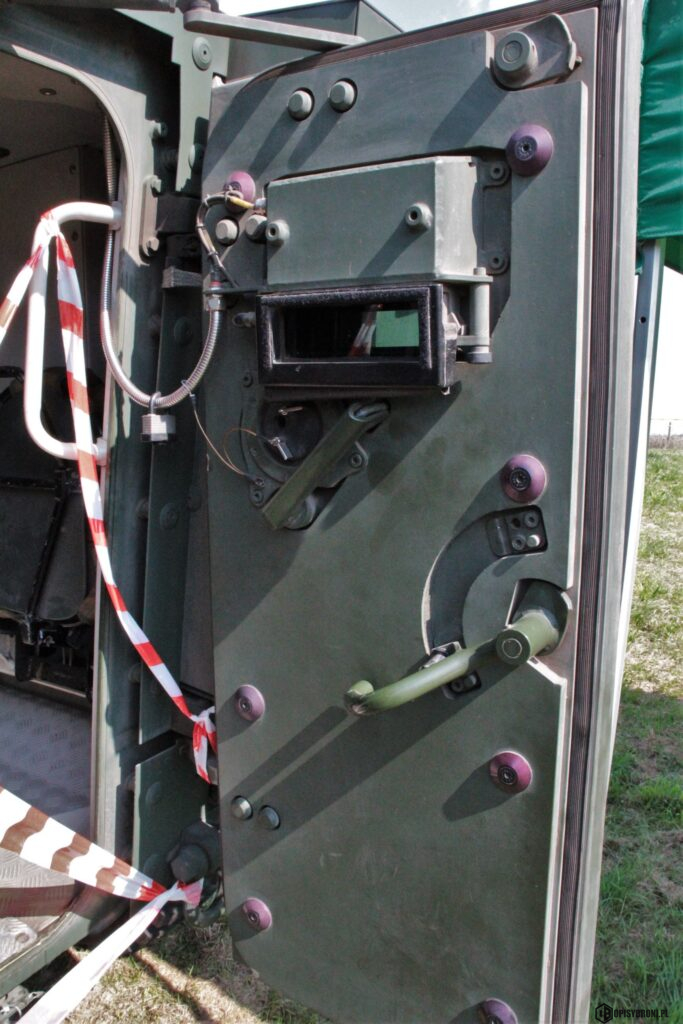
Oszklona osłona stanowiska kierowcy
Ostateczną umowę między DZ SZ MON, a WZM zawarto w kwietniu 2003 roku. Montaż pojazdów miał odbywać się w Polsce (elementy stanowiące około 30% wartości pojazdu) w Wojskowych Zakładach Mechanicznych w Siemianowicach Śląskich. Stopień „polonizacji” transporterów w początkowym okresie realizacji zamówienia miał wynieść od 0,89%, w pierwszym roku realizacji kontraktu, w 2004 roku, do około 53% do roku 2010. Umowa kompensacyjna w fińskim koncernem Patria obejmowała transfer technologii i budowę licencyjną transportera bazowego wraz z prawem eksportu na bazowe rynki uzgodnione dla WZM oraz transfer technologii systemu celowniczego oraz kamer termowizyjnych wieży dla Przemysłowego Centrum Optyki S.A. (obecnie PCO S.A.). Przedmiotem kontraktu była liczba 313 sztuk BWP Rosomak z wieżami Hitfist-30 w wersji polskiej, z tego 96 wyposażonych w wyrzutnie przeciwpancernych pocisków kierowanych, a także liczbę 377 wozów bazowych bez uzbrojenia. Pojazdy bazowe miały zostać wykorzystane do zabudowy jako transportery opancerzone uzbrojone w zdalnie sterowane stanowiska strzeleckie (125 sztuk), wozy dowodzenia szczebla taktycznego (78 sztuk), wozy ewakuacji medycznej (41 sztuk), wozy artyleryjskie (23 sztuki), wozy pomocy technicznej (34 sztuki), wozy wsparcia inżynieryjnego (22 sztuki), wozy rozpoznania inżynieryjnego (5 sztuk), wozy rozpoznania skażeń (17 sztuk) oraz bojowe wozy rozpoznawcze (dowódczy i liniowy) – ze skróconym kadłubem w układzie liniowym 6×6 (32 sztuki). Ich opracowywanie miało postępować stopniowo, wraz z seryjną (licencyjną) produkcją wersji bwp i odmiany bazowej, a finansowanie prac konstrukcyjnych oraz zakup i montaż odpowiedniego wyposażenia specjalistycznego miały odbywać się w ramach kolejnych, osobnych postępowań, osobno również finansowanych. W późniejszym terminie miał być także sfinansowany program wyposażenia części wież Hitfist-30 w przeciwpancerne pociski kierowane Spike-LR, wybrane w lipcu 2002 roku.
Narodziny Rosomaka
Z chwilą podpisania kontraktu na transportery, wóz w wariancie dla Polski, oznaczony jako XC-360P, miał dopiero powstać. Przede wszystkim z uwagi na polskie wymagania dotyczące pływalności oraz wymogów transportu lotniczego (obniżenie masy bojowej do 22 000 kg) – XC-360 posiadał masę 26 000 kg oraz zmiany w konstrukcji kadłuba (kadłub miał być węższy o 70 mm, tylne drzwi dwuskrzydłowe, zamiast pojedynczych) i wieży (zmian w kształcie paneli pancerza i w konstrukcji łoża karabinu maszynowego). W lutym 2004 roku przekazano do prób pojazd przedseryjny o numerze PS-0 (bez zmienionych tylnych drzwi), szósty wyprodukowany egzemplarz AMV. Na początku kwietnia był badany w Polsce. Próby objęły testy na drogach utwardzonych, w terenie oraz pływanie w Bałtyku. Następnie w okresie kwiecień-maj testowano go we Włoszech (próby z prototypową wieżą Hitfist-30P, przygotowaną dla odbiorcy polskiego). W maju 2004 roku pierwsze dwa pojazdy seryjne dla Polski o numerach PL-1 i PL-2 wyprodukowane w zakładach Patrii w Hameenlinna dotarły do naszego kraju. W zakładach w Siemianowicach Śląskich odbył się montaż dostarczonej z Włoch, zmodyfikowanej zgodnie z polskimi wymogami wieży Hitfist-30P o masie zmniejszonej z 2900 kg, do 2400 kg na wozie nr PL-1 oraz doposażenie i sprawdzenie obu transporterów.

PKW Czad – przygotowania do powrotu do domu
W czerwcu 2004 roku, w czasie uroczystej prezentacji w Wojskowym Instytucie Techniki Pancernej i Samochodowej. AMV w wersji dla Wojska Polskiego ochrzczono Rosomak. Wóz z wieżą Hitfist-30P nie posiadał dodatkowego sufiksu po nazwie, transporter ze zdalnie sterowanym stanowiskiem strzeleckim nazwano Rosomak-1, transporter ze zdalnie sterowanym stanowiskiem, do przewozu obsługi przeciwpancernych pocisków kierowanych nazwano Rosomak-2, wozy rozpoznawcze – Rosomak-R1 (dowódczy) oraz Rosomak-R2 (liniowy), wozy dowodzenia – Rosomak-WD (Rosomak-WDST), wozy dowodzenia artylerii – Rosomak-WA, wozy ewakuacji medycznej – Rosomak-WEM, wozy pomocy technicznej – Rosomak WPT (Rosomak-WZT), wozy wsparcia inżynieryjnego – Rosomak-KTWI, wozy rozpoznania inżynieryjnego – Rosomak-KTRI, a wozy rozpoznania skażeń – Rosomak-RSK.
Pierwsza para Rosomaków, bojowy wóz piechoty i pojazd bazowy, została wykorzystana do serii testów, prowadzonych od września do listopada 2004 roku. Miały one wykazać ich zgodność z parametrami wskazanymi przez MON. Wypadły one pozytywnie, niemniej jednak wymagano wprowadzenia pewnych poprawek w seryjnych wozach. Co bardzo istotne polska strona odstąpiła wówczas, od wymogu transportowania Rosomaka przez samolot transportowy C-130 Hercules (sam pojazd mieścił się w ładowni samolotu, ale jego bezpieczne zakotwiczenie w ładowni było niemożliwe). W ramach sprawdzenia zgodności transporterów ze specyfikacją istotnych warunków zamówienia oba prototypy przejechały w sumie ponad 25 tysięcy kilometrów, z armaty wystrzelono łącznie 545 pocisków treningowych i 197 podkalibrowych, a także 1066 pocisków z karabinu maszynowego oraz 70 granatów dymnych. Sprawdzenie obejmowało 240 parametrów w 51 działach. Ostatecznie XC-360P spełnił 212 z nich. W przypadku 22 stwierdzono konieczność wprowadzenia poprawek w terminie od lipca 2005 roku, a sześciu parametrów pojazd nie spełnił. Były to: niższa celność prowadzenia ognia z armaty do celów ruchomych, niezgodność z przyjętymi rozmiarami do transportu lotniczego przez C-130 Hercules, zbyt mała prędkość pływania do tyłu, niższa niż wymagana moc jednostkowa zespołu napędowego, zbyt długi czas uruchamiania kamery termowizyjnej oraz niesprawność systemów: przeciwpożarowego oraz przeciwwybuchowego. Kontrowersje budziła także konstrukcja nośna pojazdu – według jednego z wymogów specyfikacji, wybrany transporter opancerzony miał posiadać konstrukcję samonośną, XC-360P posiadał natomiast ramię (wspornik, zawieszenie). Ostatecznie uznano, że kadłub jest konstrukcją samonośną, a rama wzmacnia jego odporność przeciwko wybuchom min i znacząco ułatwia remont uszkodzonych ram spowodowanych detonacją ładunku wybuchowego pod pojazdem.

Ćwiczenia “Anakonda-12”
Ostatecznie w listopadzie 2004 roku Departament Polityki Zbrojeniowej Ministerstwa Obrony Narodowej wydał orzeczenie o zgodności pojazdu z wymaganiami, a w grudniu szef Sztabu Generalnego WP wydał decyzję o przyjęciu Rosomaka do wyposażenia Sił Zbrojnych RP. Oficjalna uroczystość przekazania pierwszych transporterów wojsku nastąpiła w styczniu 2005 roku w zakładach w Siemianowicach Śląskich (choć formalnie pierwsze wozy odebrano w grudniu 2004 roku).Wojska Lądowe przyjęły wówczas dziewięć wyprodukowanych w Finlandii pojazdów, w tym trzy z wieżą oraz sześć wozów bazowych – łącznie w zakładach Patria miało być wyprodukowanych 40 pierwszych Rosomaków.
Rozwój programu
Pierwsza umowa z kwietnia 2003 roku opiewała faktycznie tylko na jedną w pełni wyposażoną odmianę pojazdu, jaką był bojowy wóz piechoty z wieżą Hitfist-30P. Zakładano, że Rosomak będzie stanowił wyposażenie ośmiu batalionów piechoty zmotoryzowanej wchodzących w skład 17. Wielkopolskiej Brygady Zmechanizowanej, 12. Brygady Zmechanizowanej (po trzy bataliony) oraz 21. Brygady Strzelców Podhalańskich (dwa bataliony). Łącznie batalion miał mieć 62 pojazdy typu Rosomak, w tym 53 sztuki w wersji bojowej z armatą kalibru 30 mm lub wkm 12,7 mm. W następnym roku zawieszono jednak liczbę wozów z uzbrojeniem w pododdziale do 56 sztuk (batalionów – łącznie 75 sztuk Rosomaków).

Piękny widok
Jeszcze w 2005 roku rozpoczęto proces przygotowania WZM S.A. do montażu pojazdów, stopniowo uruchamiano kolejne procesy produkcji wozu. We wrześniu Departament Polityki Zbrojeniowej MON zatwierdził wymagania modyfikacje wprowadzone modyfikacje wprowadzone w wersji produkcyjnej KTO Rosomak – na odebranych wozach miały być wprowadzone do czerwca 2006 roku. Pojazdy miały zmiany konstrukcyjne, m.in.: układ wydechowego, kosza wieży, systemu celowniczego i systemu kierowania ogniem oraz modyfikacje wyposażenia w tym układu środków łączności i dowodzenia, system ostrzegania o opromieniowaniu, układów filtrowentylacji, wprowadzono również nowy falochron i otwory strzelnicze w drzwiach tylnych oraz system ochrony przed bronią masowego rażenia Cherdes zamiast ASS-1 Tafios. Pierwszego całkowicie zamontowanego w Polsce Rosomaka w wersji z Hitfist-30P przekazano wozu w grudniu 2005 roku. Z kolei w 2008 roku uzyskano od strony fińskiej dokumentację w wersji AMV 8×8 SP (System Platform) z podwyższonym przedziałem roboczym. Po rezygnacji z jej wykorzystania w latach 2008-2009 WZM opracowały własną wersję podwyższonego kadłuba, koncepcyjnie odpowiadają fińskiej odmianie AMV 8×8 SP, a także wóz – nośnik uzbrojenia, przygotowany do montażu systemu wieżowego z uzbrojeniem artyleryjskim, ewentualnie systemów specjalnych o dużych gabarytach albo wymagających zwiększonej stabilności wozu, ze wzmocnionym stropem kadłuba i zawieszeniem oraz zmianami wyposażenia pokładowego. Prototyp tego ostatniego z wymienną płytą podwieżowego powstał w 2010 roku i stanowi bazę dla egzemplarzy produkcyjnych podwozia moździerza samobieżnego Rak. Był także testowany z wieżą CMI Defence CT-CV z armatą kalibru 105 mm jako Wóz Wsparcia Ogniowego Wilk. W tym czasie rozszerzono oryginalne zamówienie na 690 Rosomaków o trzy wozy w wersji bazowej wykonanej jako zestawy części.
Do produkcji kadłubów KTO początkowo używano stali SSAB Swedish Steel Armox, która stopniowo była zastępowana stalą pochodzącą z Huty Stali Jakościowych S.A., a pierwszy kadłub Rosomaka wykonany ze stali pochodzących z huty zespawano w styczniu 2010 roku. Wieże początkowo importowano z Włoch w całości (50 sztuk), następnie w częściach (33 sztuk), które były montowane w Zakładach Mechanicznych Bumar-Łabędy S.A., na bazie umowy z marca 2006 roku i w grudniu tego roku wyprodukowano w Polsce pierwszy egzemplarz Hitfist-30P. Po zakończeniu obowiązywania tego kontraktu i wyprodukowaniu wszystkich zamówionych przez MON wież, w 2014 roku linię montażową przeniesiono do Siemianowic Śląskich. W lipcu następnego roku Rosomak S.A., podpisała porozumienie o nieodpłatnym przekazaniu licencji na montaż i remonty wież oraz prawa do modernizacji już wykazanych systemów wieżowych do 2035 roku.

Przygotowanie wozu do przekroczenia przeszkody wodnej
Wóz rozpoznawczy
Zgodnie z pierwotnymi polskimi założeniami i specyfikacją wersji AMV, zawartą w umowie z fińską firmą z kwietnia 2003 roku, zakłady Patria powinny opracować skrócony wariant pojazdu o układzie jezdnym 6×6. Łącznie 32 Rosomaki tego wariantu, wyposażone analogicznie jako KTO-bojowe systemy wieżowe, miały występować w dwóch wersjach: wóz dowódczo-rozpoznawczy rozpoznania ogólnowojskowego Rosomak R-1 i wóz rozpoznawczy rozpoznania ogólnowojskowego Rosomak R-2. Patria przygotowała prototyp pojazdu XC-316P z kadłubem krótszym o 670 mm i o mniejszej objętości wewnętrznej oraz odpowiednio skróconych wspornikach zawieszenia – w wyniku tej zmiany do 2480 mm zwiększył się rozstaw między drugą, a trzecią osią. Rozstaw pomiędzy pierwszą, a drugą osią pozostał bez zmian i wynosił 1400 mm. Masa AMV 6×6 została ograniczona do 19 500 kg. Prototyp wozu rozpoczął próby fabryczne w czerwcu 2005 roku. Testy jednak wykazały problemy z zawieszeniem wozu oraz zbyt małą pojemność kadłuba dla zakładanego wyposażenia specjalistycznego – spółka uznała, że pojazd w tej wersji nie pomieści wszystkich oczekiwanych systemów optoelektronicznych na wysuwanym maszcie. Ostatecznie w lipcu 2006 roku zdecydowano się na zakup wozów rozpoznawczych w układzie jezdnym w wersji 8×8, z jednoczesną rezygnacją z uzbrojenia wieżowego, dla zdalnie sterowanego systemu z wkm 12,7 mm. Zachowano podział na wozy rozpoznawcze w odmianach dowódczych; Rosomak R-1 oraz tzw. liniowych Rosomak R-2. Do marca 2008 roku opracowano skorygowane wymagania taktyczno-techniczne dla rozpoznawczych Rosomaków i we wrześniu tegoż roku Departament Polityki Zbrojeniowej Ministerstwa Obrony Narodowej podpisał z Wojskowymi Zakładami Mechanicznymi S.A. (obecnie Rosomak S.A.), umowę na realizację pracy rozwojowej, mającej na celu opracowanie dwóch prototypów wozów rozpoznawczych. Zgodnie z założeniami MON łącznie miało być zbudowanych 50 wozów rozpoznawczych, w tym 16 sztuk dowódczo-rozpoznawczych Rosomak R1 oraz 34 sztuki rozpoznawczych liniowych R2. Realizacja pracy rozwojowej postępowała jednak od samego początku powoli i kilkukrotnie odnotowano długotrwałe przerwy w jej realizacji, w tym na etapie uzgodnień projektów technicznych pojazdów i zestawów wyposażenia specjalistycznego. W sierpniu 2012 roku ukończono demonstrator rozpoznawczego Rosomaka na bazie bojowej pojazdu z załogową wieżą Hitfist-30P. Pojazd został wyposażony w zestawy specjalistyczne, jednak w nie docelowym zestawie, uzgodnionym z MON. W styczniu 2014 roku zaakceptowano skorygowane wymagania taktyczno-techniczne i w kwietniu tego roku Inspektorat Uzbrojenia MON podpisał z Rosomak S.A. aneks do umowy z września 2008 roku. Zgodnie z nowym harmonogramem zakończenie prac nad wozami rozpoznawczymi przewiduje się do końca 2017 roku, w tym samym roku mają być odebrane dwa pierwsze egzemplarze, a dostawy seryjnych pojazdów powinny być według ustalonych terminów w latach 2018-2019. Prototypy obu wariantów zwiadowczego Rosomaka zostały ukończone w lipcu 2016 roku. Wozy te posiadają nowy sprzęt obserwacyjny dowódcy, system detekcji wystrzałów, dodatkowe środki przetwarzania oraz analizy informacji rozpoznawczych oraz nowy system łączności i transmisji danych. Wersja dowódczo-rozpoznawcza posiada dodatkowo wysuwany teleskopowo maszt, umieszczony w przedziale roboczym i optoelektroniczną głowicą obserwacyjną i stacją radiolokacyjną pola walki. Obie odmiany mają być wyposażone w zdalnie sterowany system wieżowy ZSSW-30, opracowany w Polsce przez konsorcjum pod przewodnictwem Huty Stalowa Wola S.A. Natomiast w 2010 roku jeden z pojazdów bazowych posłużył do budowy nowego wozu rozpoznania elektronicznego.


















































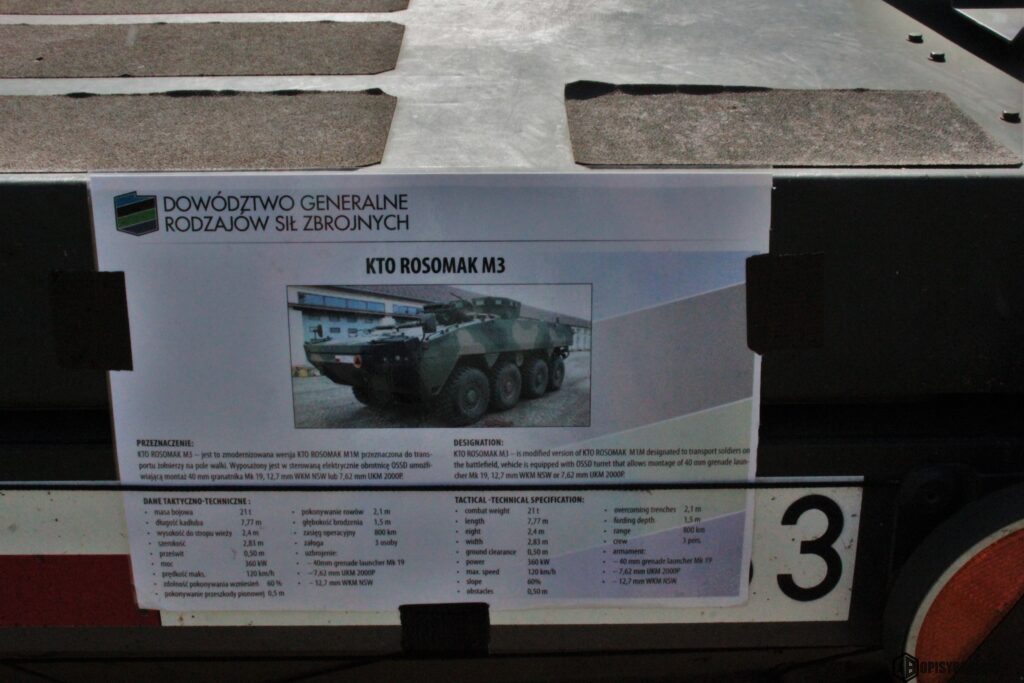












Rosomak-M3
Wóz należący do 17. Wielkopolskiej Brygady Zmechanizowanej
Autor: Dawid Kalka
Kalisz, XX Piknik Militarny – 18 czerwca 2022
Bojowe wozy rozpoznawcze Rosomak-R1 i Rosomak-R2 są przeznaczone do prowadzenia rozpoznania ogólnowojskowego w bezpośredniej styczności z przeciwnikiem. Pojazdem bazowym dla wersji rozpoznawczych Rosomaka jest transporter w odmianie doświadczalnej o zwiększonej wyporności z falochronem rozkładanym hydraulicznie. Zwiększony zapas wyporności wozu ma być uzyskany dzięki zastosowaniu lżejszego opancerzenia zewnętrznego nanoceramicznego o zmienionym kształcie i wymiarach. Przestrzeń dylatacji powietrznej pomiędzy kadłubem, a dodatkowym opancerzeniem została wypełniona pianką wypornościową. Na górnej płycie kadłuba zamontowano kasetę wypornościową z takim samym wypełnieniem. Pojazd zachowuje zdolność do pływania przy masie 23 300 kg.
Pojazdy rozpoznawcze zostały wyposażone w zmodyfikowany układ zasilania elektrycznego, dostosowany do współpracy z zewnętrzną siecią przemysłową, nowy blok zasilania akumulatorowego z akumulatorami typu AGM w układzie 4+4 i agregat prądotwórczy. Prawy zasobnik z tyłu kadłuba jest wykorzystywany na dodatkowe wyposażenie specjalistyczne. Pojazd posiada także przenośny filtr wody FPW-50. W rozpoznawczych Rosomakach zostało zamontowane wyposażenie specjalistyczne, wspólne dla obu wariantów oraz dodatkowe, w wersji dowódczo-rozpoznawczej. Oba wozy otrzymały dodatkowe urządzenia rozpoznawcze, środki łączności i przetwarzania danych, umożliwiające wykonanie zadań w każdych warunkach i we współpracy z innymi partnerami sił NATO.

Przygotowanie wozu do przekroczenia przeszkody wodnej
Prototypy wozów rozpoznawczych wyposażono w zmodyfikowany model wieży Hifist-30P z panoramicznym przyrządem obserwacyjnym dowódcy SELEX Galileo Janus RSTA z kamerą termowizyjną, kamerą telewizyjną oraz dalmierzem laserowym, zintegrowany z systemem kierowania ogniem. Na wieży umieszczono głowicę z czujnikami układu lokalizacji strzałów MacDonald Dettwiler & Associates Ferret Mk. I lub Pilar Mk. II. Stanowisko dowódcy na wieży zostało odpowiednio zmodyfikowane – otrzymało terminal ZSA (Zautomatyzowany System Rozpoznania) z monitorem i panel sterowania głowicą optoelektroniczną Janus. Zwiadowcy-operatorzy mają terminale ZSA, terminal zwiadowcy siedzącego po prawej jest wynośny. W wersji dowódczo-rozpoznawczej Rosomak-R1 terminale mają możliwość sterowania głowicą optoelektroniczną i radarem na maszcie oraz głowicą na wieży wozu.
Wóz dowódczo-rozpoznawczy rozpoznania ogólnowojskowego Rosomak-R1 ma we wnętrzu przedziału roboczego, po lewej stronie za drzwiami wejściowymi, komorę z wysuwanym masztem teleskopowym, podnoszonym hydraulicznie. Na maszcie jest zamontowana stacja radiolokacyjna pola walki Aselsan ACAR Ground Surveillance Radar i głowicą optoelektroniczną FLIR Systems z kamerą termowizyjną, kamerą telewizyjną oraz dalmierzem laserowym z podświetlaczem. Radiolokator można zdemontować z masztu i rozwinąć na trójnogu poza pojazdem. Dodatkowym środkiem obserwacyjnym jest zestaw obserwacji dookólnej i detekcji zagrożenia, z których obraz jest przetwarzany w tzw. pełną panoramę. Pojazd dysponuje wyposażeniem wynośnym, w tym dzienno-nocnym przyrządem obserwacyjnym i mikrofonem kierunkowym oraz systemem ochrony perymetrycznej. Z uwagi na pełnienie funkcji pojazdu dowodzenia plutonu rozpoznawczego wóz posiada dwie radiostacje RF-5800H-MP, radiostację do łączności z lotnictwem zakresu UKF-KF i radiostację szerokopasmową oraz serwer pokładowy i WB Electronics DD9620S, routery Transbit PTRD-16G i PTRD-RT. System łączności wewnętrznej Fonet wykonano w wersji zmodyfikowanej, dostosowanej do pracy z rozbudowanymi środkami łączności i tworzącymi sieć ze środkami łączności zwiadowców. Wóz rozpoznawczy rozpoznania ogólnowojskowego Rosomak-R2 nie posiada masztu z radarem i głowicą optoelektroniczną. Nowe środki łączności ograniczają się do radiostacji Radmor RRC-9310AP oraz RF-5800H-MP i urządzeń do transmisji danych. W miejscu komory z masztem znajduje się dodatkowe wyposażenie specjalistyczne.

Przygotowanie wozu do przekroczenia przeszkody wodnej
Załoga rozpoznawczego Rosomak-R1 składa się z pięciu żołnierzy: dowódcy, będącego jednocześnie dowódcą plutonu rozpoznawczego, działonowego, kierowcy i dwóch zwiadowców-obserwatorów, z których jeden jest operatorem radaru, drugi – głowicy optoelektronicznej na mszcie teleskopowym. Załoga Rosomaka-R2 liczy także pięciu żołnierzy: dowódca, działonowy, kieowca i dwóch zwiadowców-obserwatorów obsługujących wynośne środki rozpoznawcze. Seryjne pojazdy mają mieć docelowe rozwiązania w zakresie systemów łączności, których konfiguracja jest uzależniona od wyborów w ramach nowego, cyfrowego systemu zarządzania polem walki BMS (Battle Management System) dla wszystkich pododdziałów Rosomaków.
Transporter opancerzony
W założeniach, które były podstawą zamówienia transporterów AMV 8×8 wymagano aby 125 transporterów bazowych nazwanych Rosomak-1 miało być wyposażonych w zdalnie sterowany system strzelecki z wkm kalibru 12,7 mm. W marcu 2005 roku w MON zatwierdzono wymagania wobec takiego modułu, którym opcjonalnym uzbrojeniem miał być wielkokalibrowy karabin maszynowy 12,7 mm, lub karabin maszynowy kalibru 7,62 mm lub granatnik automatyczny kalibru 40 mm. W czerwcu tego roku rozpoczęto postępowanie przetargowe dotyczące wyboru stanowisk. Przystapiło do niego pięciu konkurentów, w tym Kongsberg z systemem M151 Protector RWS, Recon Optical z SRWS CROWS, OTO-Melara z Hitrole, Rafael z RCWS-12,7 Mini Samson, każdy z polskim partnerami i Ośrodek Badawczo-Rozwojowy Sprzętu Mechanicznego Sp. Z.o.o. (obecnie ZM Tarnów S.A.), z ZSMU-12,7 Kobuz. Żądne z wymienionych stanowisk w pełni nie spełniało polskich wymagań przetargu, ale w październiku tego samego roku dokonano wyboru stanowiska RCWS-12,7 i złożono deklarację, że polska firma „Bumar-Łabędy” Sp. Z.o.o., będzie zasadniczym podmiotem dostaw co najmniej 249 stanowisk strzeleckich, gdyż oprócz transporterów bazowych, planowano uzbrojenie nimi także części wersji specjalistycznych z rodziny wozów Rosomak, w tym 135 Rosomak-1, 30 wozów Rosomak-2, 84 wozów dowodzenia, a także później 34 pojazdów zabezpieczenia technicznego. W związku z protestami pozostałych konkurentów, w marcu 2006 roku MON wezwało trzech oferentów – OTO-Melara, Rafael i OBR SM – do złożenia ponownie ostatecznych propozycji. Oferta włoska okazało się później nieważna, a wśród dwóch pozostałych ostatecznie wybrano stanowisko strzeleckie Kobuz, ale polski podmiot wycofał się szybko z procedury negocjacji umowy z uwagi na zbyt niskie moce produkcyjne w stosunku do planowanej skali dostaw. Ostatecznie wszystkich konkurentów ponownie zaproszono do złożenia ofert i w maju 2006 roku wskazano, że zwycięską ofertę przygotował koncern OTO-Melara. W lipcu pomiędzy włoskim producentem, a Bumar-Łabędy Sp. Z.o.o. oraz WZM S.A., podpisano porozumienia dotyczące dostaw 165 stanowisk strzeleckich Hitrole, dla 135 Rosomaków 1 i 30 Rosomaków-2, które miały być odebrane przez wojsko w latach 2006-2013. W ciągu kilku następnych miesięcy nie podpisano żadnej, odpowiedniej umowy kompensacyjnej z Włochami, dlatego postępowanie zakończyło się na niczym.
a). Wersje Rosomak-1 i Rosomak-2
Rosomak-1 to prototyp transportera piechoty wyposażony w zdalnie sterowane stanowisko strzeleckie OTO-Melara Hitrole w wersji, która jest dostosowana do polskich wymagań z karabinem maszynowym FN MAG, kalibru 7,62 mm lub wielkokalibrowym karabinem maszynowym M2HB, kalibru 12,7 mm i magazynem amunicyjnym we wnętrzu pojazdu. Pojazd ma aranżację wnętrza jako pojazd bazowy, miejsce dowódcy za przedziałem kierowania, wyposażony w indywidualny właz, standardowe przyrządy obserwacyjne i terminal DD9620T. Stanowisko działonowego – operatora stanowiska strzeleckiego znajdowało się w miejscu kosza wieży KTO-bojowym. Prototyp miał zaślepiony otwór w stropie pod wieżą i w tym miejscu, pod modułem zamontowano stanowisko (kosz „mini” wieży) operatora połączone mechanicznie z Hitrole. Bezpośrednio za stanowiskiem, w stropie, wykonano otwór z włazem przeznaczonym do awaryjnej obsługi. Wokół stanowiska strzeleckiego zamontowano cztery detektory systemu ostrzegania przed opromieniowaniem SSP-1 Obra-3, a na obrotowej platformie modułu – sześć wyrzutni granatów dymnych kalibru 81 mm. Rosomak-2 był projektem transportera opancerzonego, z taki samym uzbrojeniem, przystosowanym dodatkowo do przewożenia dwóch wyrzutni przeciwpancernych pocisków kierowanych Spike-LR z czterema zapasowymi pociskami.
b). Rosomak-M2 i Rosomak-M3
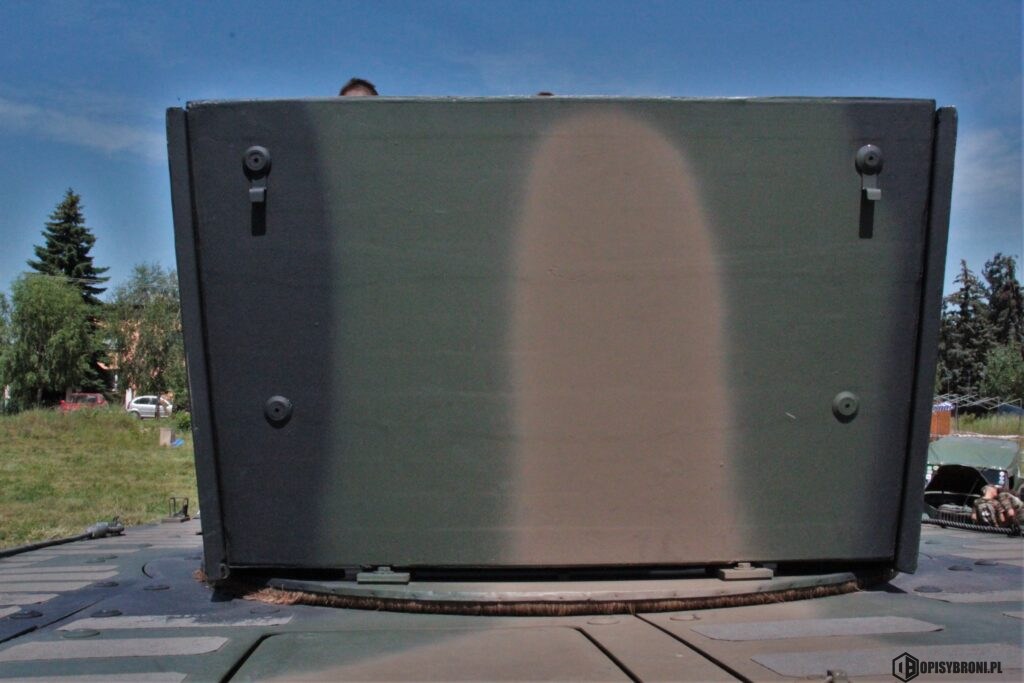
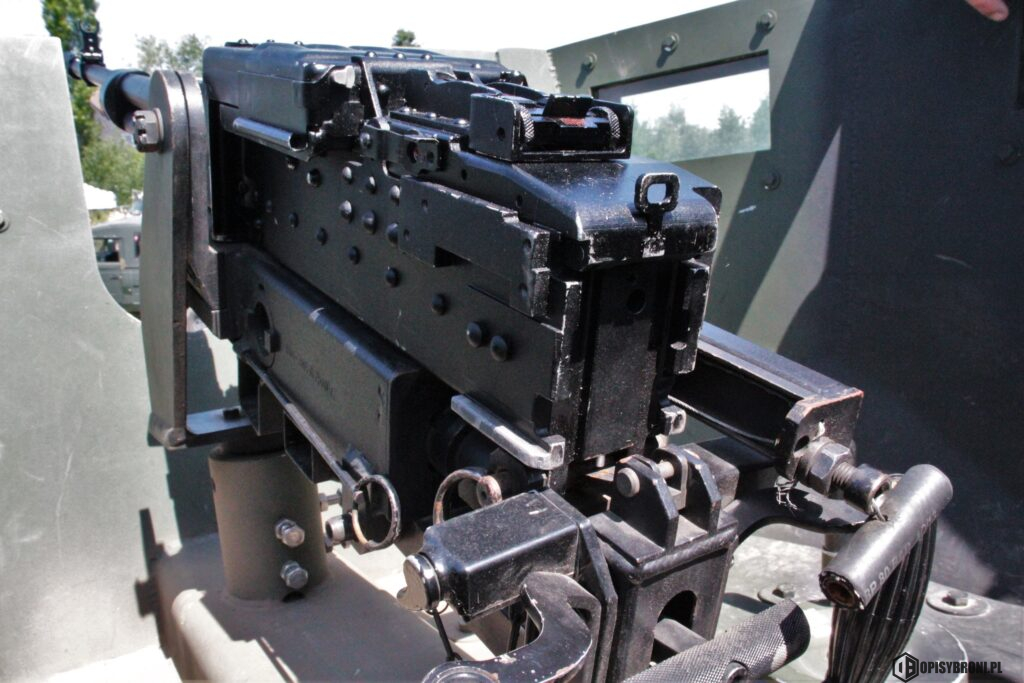
Rosomak-2 miał pełnić funkcję pojazdu logistycznego. W przedziale roboczym zamontowano siedziska, wprowadzono pasy mocowania ładunku, rozbudowany jak w wersji bojowej przyrząd obserwacyjny kierowcy NAPS-14, oświetlacze laserowe, system łączności wewnętrznej Fonet i przeciwpożarowy Deugra, składany nóż do cięcia lin, pojemnik na drut ostrzowy. Pojazd został wyposażony w pancerną obrotnicę OSS-M (Opancerzone Stanowisko Strzelecki – Małe) z napędami ręcznymi, przekładniami w azymucie i elewacji, uzbrojonym w karabin maszynowy, wielkokalibrowy karabin maszynowy lub samoczynny granatnik automatyczny. Opancerzenie OSS-M zapewnia ochronę balistyczną na poziomie 2, według STANAG 4569A. Na odmianie Rosomak-M3 zamontowano w kolei stanowisko strzeleckie OSS-D (Opancerzone Stanowisko Strzeleckie – Duże), wyposażone w napędy elektryczne o takim samym poziomie ochrony balistycznej i uzbrojone jak analogicznie do OSS-M.

Przedział desantowy
Wóz ewakuacji medycznej
W lutym 2006 roku w WZM S.A., we współpracy z AMZ Kutno Sp. Z.o.o., rozpoczęto opracowywanie pojazdu ewakuacji medycznej Rosomak-WEM. Prace zostały przyśpieszone w związku z potrzebami operacyjnymi polskich kontyngentów wojskowych na terenie Iraku oraz Afganistanu, i oczywiście z faktem, że przebudowane do wersji opancerzonego ambulansu wozy Ryś-MED, w ocenie użytkownika, nie sprawdziły się w trudnych warunkach. Analizy wykazały, że w standardowym kadłubie Rosomaka nie ma jednak odpowiedniego zapewnienia wymogów dla warunków pracy wojskowych ratowników medycznych. W trakcie opracowywania prototypu Rosomak-WEM, wykorzystano zmodyfikowane wymagania taktyczno-techniczne dla Ryś-MED z maja 2004 roku. W sierpniu 2006 roku zaprezentowano demonstrator wozu ewakuacji medycznej Rosomak-WEM PM-1. Ze stropu środkowej i tylnej części kadłuba zdjęto część płyt środkowych, nie będących elementami siłowymi konstrukcji transportera i w tym miejscu zabudowano nadbudówkę węższą od kadłuba wozu, a na stropie zamontowano dodatkowy pojemnik na wyposażenie obserwacyjne i oświetleniowe. W czerwcu 2007 roku zatwierdzono plan przebudowy 33 kolejnych pojazdów bazowych na wersję WEM, jednocześnie powstał drugi, ulepszony demonstrator PM-1, tzw. WEM „skręcany”, w którym zdemontowano także centralną płytę stropową kadłuba, dzięki czemu nadbudowa miała szerokość kadłuba. Pojazd przeszedł pozytywne próby zatwierdzone orzeczeniem wydanym w grudniu tego roku. Sześć WEM, zamówionych w grudniu 2007 roku, które odebrano w roku następnym. W 2008 roku opracowano ostateczną odmianę Rosomak-WEM PM-2 ze zdjętymi wszystkimi płytami stropowymi kadłuba i docelowym wariantem nadbudowy. Masa maksymalna pojazdu wynosiła 22 000 kg. We wrześniu 2018 roku zamówiono 27 sztuk tych pojazdów, które zostały odebrane w latach 2009-2011, poza tym również wersja PM-1 zostały przebudowane do docelowego wariantu. {Pierwsze wozy ewakuacji medycznej, które w 2009 roku znajdowały się w PKW, w Afganistanie otrzymały panele dodatkowego opancerzenia kadłuba z Rafaela oraz płyty ze stali pancernej Armstal z polskiej Huty Stali Jakościowych S.A., a w następnym 2010 roku siatkowe ekrany przeciwkumulacyjne Qinetinq RPGNet.



Wersja Medyczna
Autor – zdjęcia: Dawid Kalka
Opole, 10. Brygada Logistyczna
Rosomak-WEM jest przeznaczony do ewakuacji rannych, do punktów opatrunkowych i udzielenia pierwszej pomocy medycznej. Pojazd posiada odmienną konstrukcję przedziału roboczego. Jest on wyższy od pojazdu bazowego i powstał poprzez zdjęcie z wyprodukowanych już wozów bazowych stropowych płyt środkowej i tylnej części kadłuba oraz zabudowaniem w tej miejscu odpowiedniej nadbudówki z powiększonymi tylnymi drzwiami. Poziom opancerzenia nowych elementów kadłuba jest analogiczny w stosunku do wersji bazowej (część wozów została dodatkowo dopancerzona). Nadbudówki zostały osłonięte polskimi panelami pancernymi. Załogę Rosomaka-WEM stanowią: dowódca-ratownik, kierowca i dwóch sanitariuszy. Do przedziału ewakuacyjnego można zabrać maksymalnie trzech rannych żołnierzy, siedzących bokiem do kierunku jazdy. Na stropie nadbudówki został umieszczony pojemnik z wysuwanym masztem teleskopowym, podnoszonym hydraulicznie, z systemem obserwacyjnym WB Electronics POZOR z kamerą dzienną Sony, kamerą termowizyjną FLIR Systems i ośmioma reflektorami fluorescencyjnymi. Rosomak-WEM ma system łączności wewnętrznej Fonet z radiostacjami indywidualnymi PNR-500, radiostację RRC 9500 i terminal dowódcy DD9620T. Standardowym wyposażeniem tej wersji jest także układ nawigacyjny TALIN 3000 z odbiornikiem systemu satelitarnego GPS HGPST-T.
Wyposażenie przedziału medycznego składa się z wysuwanych hydraulicznie noszy, ławki dla czterech rannych siedzących, noszy podbierakowych i drążkowych, instalacji tlenowej z gniazdami tlenowymi typu panelowego z punktami poboru typu AGA szybkozłączami i maskami tlenowymi, ogrzewaczy płynów infuzyjnych, defibrylatora, plecaków medycznych z wyposażeniem, torby reanimacyjnej, uchwytów do mocowania kroplówek, gniazda elektrycznego do podłączenia sprzętu medycznego, szyny unieruchamiającej, desek ortopedycznych o kołnierz7y ortopedycznych.

Wersja Medyczna
Moździerz samobieżny Rak
Historia konstrukcji
W 2004 roku w Centrum Produkcji Wojskowej Huty Stalowa Wola S.A., rozpoczęto pierwsze prace koncepcyjne nad moździerzem samobieżnym kalibru 120 mm. W tym samym roku sformowano wstępne wymagania taktyczno-techniczne dla nowego systemu. Jako jego nośnik planowano zastosowanie transportera opancerzonego Rosomak, zgodnie z sformułowanym w 2003 roku przez szefostwo Wojsk Rakietowych i Artylerii postulatem wprowadzenia samobieżnych moździerzy na podwoziu kołowym do batalionów piechoty zmotoryzowanej. Ustalono, że zostanie wprowadzony autonomiczny zespół wieżowy z moździerzem samoczynnym, dostosowując do zamontowania na podwoziach kołowych lub gąsienicowych o wymaganej nośności i sztywności, umożliwiający prowadzenie ognia w pełnym zakresie kątów w azymucie oraz w elewacji, w tym strzelanie na wprost do celów obserwowanych przez załogę pojazdu. W maju 2005 roku ze środków własnych CPW HSW S.A., opracowano projekt modułu ogniowego wyposażonego w samobieżne moździerze kalibru 120 mm, w pierwszej kolejności miał powstać najistotniejszy element modułu, czyli sam środek ogniowy. W pracach wykorzystywano wyniki prowadzonych w Stalowej Woli prac nad elementami innych artyleryjskich systemów ogniowych, np. opracowanych dla armatohaubic Krab. Pewien wpływ na konfigurację polskiego systemu miały możliwości fińskich moździerzy kalibru 120 mm firmy Patria Vehicles na podwoziach AMV 8×8: dwulufowego AMOS (Advanced MOrtar System) i jednolufowego NEMO (NEw MOrtar), ale sam projekt był polskim, oryginalnym rozwiązaniem. W kwietniu 2007 roku z Ministerstwem Nauki i Szkolnictwa Wyższego podpisano umowę na finansowanie projektu celowego pod nazwą „120 mm samobieżnego moździerza na podwoziu kołowym lub gąsienicowym”. Projekt techniczny elementów wieży z moździerzem MAHSW, kalibru 120 mm powstawał w latach 2006-2007, następnie przystąpiono w 2008 roku do budowy pierwszego demonstratora technologii. W tym samym roku oddano pierwsze próbne strzały z kompletnej części artyleryjskiej moździerza oraz przeprowadzono próby wieży na zmodyfikowanym podwoziu gąsienicowym zaadaptowanym z haubicy 2S1 Goździk. W 2009 roku rozpoczęto również pierwsze prace nad projektem moździerza MAHSW-K na nośniku kołowym, czyli podwoziu kołowym Rosomaka, a we wrześniu tego roku pomiędzy CPW HSW S.A. i Departamentem Polityki Zbrojeniowej MON zawarto umowę na realizację pracy rozwojowej dotyczącej kompanijnego modułu ogniowego kalibru 120 mm moździerzy samobieżnych Rak z pierwotnym terminem zakończenia w 2012 roku. Odpowiednią umowę na dostosowanie bazowego transportera Rosomak do montażu systemu wieżowego sygnowano pomiędzy HSW, a WZM w kwietniu 2010 roku. W ramach umowy powstały m.in.: prototypy moździerza M120K (SMK-120) Rak i wozów dowodzenia Rosomak-AWD na podwoziu kołowego transportera opancerzonego z Siemianowic Śląskich. W pracach nad modułem brały udział oprócz HSW i WZM S.A., również m.in.: WB Electronics Sp. Z.o.o., AMZ-Kutno Sp. Z.o.o., Arex Sp. Z.o.o., Etronika Sp. Z.o.o., Jelcz Komponenty Sp. Z.o.o. i Radiotechnika Marketing Sp. Z.o.o.

KTO Rak
Prototypowy moduł z moździerzami Rak pokazano publicznie po raz pierwszy w 2012 roku. W pierwszej kolejności zakłady w Stalowej Woli miały dostarczyć Wojskom Lądowym kompletny moduł ogniowy na podwoziach operacyjnych „Modernizacja Wojsk Rakietowych i Artylerii”, który był jedną z części ujawnionego i zatwierdzonego w grudniu 2012 roku „Program Modernizacji Technicznej Sił Zbrojnych na lata 2013-2022”, planowano pozyskanie w latach 2015-2018 ośmiu modułów dywizjonowych moździerzy samobieżnych Rak na podwoziu kołowego transportera opancerzonego Rosomak. Wstępne zapotrzebowanie obejmowało 96 egzemplarzy M120K oraz 60 wozów dowodzenia dla ośmiu kompanijnych modułów ogniowych. Jeszcze w tym samym roku, po przeprowadzeniu badań kwalifikacyjnych, sformułowano uwagi i zastrzeżenia dotyczące prawidłowej pracy prototypów w całym zakresie wymagań środowiskowych określonych w założeniach taktyczno-technicznych, co wydłużyło termin zakończenia pracy rozwojowej do grudnia 2013 roku. W lipcu tegoż roku, po zmianach w zakresie trybu pozyskiwania sprzętu wojskowego i usług dla Sił Zbrojnych RP, nastąpiła jednak likwidacja prac wdrożeniowych. W związku z tym zmodyfikowano zakres wszelkich prac związanych z powstaniem modułu ogniowego oraz wydłużono ostateczny termin zakończenia prac do października 2014 roku. Z uwagi na niezakończenie prac kwalifikacyjnych i niezakończenie wszystkich zmian w dokumentacji technicznej wynikającej z przeprowadzonych testów został jednak po raz kolejny przesunięty, tym razem na maj 2015 roku. Ostatecznie testy kompletnego modułu testowego zakończono w wrześniu 2015 roku i rozpoczęto pierwsze negocjacje pomiędzy Inspektoratem Uzbrojenia MON, a HSW S.A., prowadzące do podpisania kontraktu na zakup Raków w wersji kołowej. Stosowną umowę podpisano w kwietniu 2016 roku, w jej ramach zakłady z Stalowej Woli w latach 2017-2019 mają dostarczyć łącznie 64 pojazdy w odmianie samobieżnego moździerza SMK-120 Rak dla ośmiu kompanii wsparcia batalionów zmotoryzowanych, mających na wyposażeniu bojowe wozy piechoty Rosomak.
Moździerz SMK-120 Rak został zbudowany na zmodyfikowanym podwoziu KTO ze wzmocnioną płytą pod wieżową kadłuba i zmienionymi zawieszeniami. Wyposażony jest w autonomiczny moduł wieżowy z moździerzem MAHSW kalibru 120 mm.





KTO Rosomak Rak
Autor – zdjęcia: Dawid Kalka
Opole, 10. Brygada Logistyczna
Nośnik kołowy
Moździerz Rak w służbie polskiej został osadzony na podwoziu kołowym transportera opancerzonego Rosomak. Jest to zmodyfikowane podwozie bazowe, o długości 7,8 metra i szerokości 2,8 metra. Zastosowany w pojeździe silnik SCANIA DI1249A03P o mocy 490 KM pozwala osiągnąć prędkość maksymalną wynoszącą 80 km/h. Zapas paliwa starcza na pokonanie odległości od 500 do 700 km. Nośnik pozwala na pokonywanie wzniesień o nachyleniu do 60%, maksymalny przechył boczny to 35%. Możliwe jest także pokonywanie przeszkód pionowych o wysokości do 0,5 metra, rowów o szerokości 2,1 metra oraz brodzenia do głębokości 1,5 metra. Opancerzenie zapewnia odporność balistyczną zgodną z poziomem I wg STANAG 4569.
System wieżowy
Głównym elementem systemu Rak jest 120-mm moździerz samobieżny MAHSW. Zgodnie z założeniami wieża moździerza jest autonomiczna oraz posiada możliwość montażu na dowolnym podwoziu o wystarczającej nośności. Konstrukcja wieży spawana jest z blach stalowych zapewniających ochronę balistyczną na poziomie 1 według STANAG 4569. Sam moździerz jest zaś działem samoczynnym, działającym na zasadzie długiego odrzutu lufy, ładowanie następuje w każdym jej położeniu. Broń posiada monolityczną lufę o długości 25 kalibrów, zamek klinowy o ruchu pionowym i hydrauliczny układ powrotny. Napęd wieży jest elektryczny, jednak awaryjnie może zostać załączone poruszanie ręczne. System jest wyposażony w cyfrowy system kierowania ogniem, składający się m.in. z kamery termalnej i dalmierza laserowego, dzięki czemu może skutecznie działać w dzień i w nocy, system celowniczy z celownikiem do strzelania na wprost, z kamerą termowizyjną i dalmierzem laserowym, układ automatycznego naprowadzania działa na cel, system zarządzania łącznością Fonet z radiostacją RRC-9311AP, hybrydowy system nawigacyjny. Załoga dysponuje dzienno-nocnymi przyrządami obserwacyjnymi (dowódca systemem obserwacji dookrężnej).




























KTO Rosomak Rak
Autor – zdjęcia: Dawid Kalka
Skarbimierz Osiedle, Święto Wojska Polskiego 13.08.2023
Dane może m.in. czerpać z bezzałogowego statku powietrznego FlyEye. Moździerz Rak może strzelać zdalnie jako broń bezzałogowa, wykorzystując komendy i dane przekazywane drogą elektroniczną do komputera pojazdu. System zdolny jest do oddawania celnych strzałów na odległość od 8 do 12 km. Oprócz standardowych granatów może strzelać pociskami z ładunkiem kumulacyjnym, zwalczając pojazdy opancerzone, np. wozy bojowe, amunicją dymną oraz oświetlającą. Czas przejścia z położenia marszowego w położenie bojowe – maks. 30 s., stanowisko ogniowe może opuścić w przeciągu 15 sekund od wystrzelenia ostatniego granatu. Jednostka ognia składa się z 46 pocisków. Amunicja ładowana jest za pomocą automatu ładowania.
Amunicja
Początkowo, do czasu wdrożenia nowoczesnej amunicji, polskie Raki używają starych granatów OF843B i OF843A do moździerzy holowanych, zmodernizowanych przez zastosowanie specjalnych okuć, o masie 16,02 kg i donośności 6900 m, przewidzianych do szkolenia[5]. Resort obrony narodowej w 2012 roku podpisał z konsorcjum Dezametu oraz Wojskowego Instytutu Technicznego Uzbrojenia umowę na opracowanie czterech typów 120-mm amunicji: pocisków odłamkowo-burzących HE wypełnionych trotylem, pocisków odłamkowo-burzących HE elaborowanych mało wrażliwą mieszanką K-43, pocisków dymnych (SMK) oraz oświetlających (ILL). W 2020 roku pomyślnie zakończyły się testy amunicji odłamkowo-burzącej HE wypełnionej trotylem. Nowa amunicja ma zasięg do 10 kilometrów, zaś modyfikowana OF843A/B osiąga maksymalny zasięg około 8 kilometrów.

KTO Rosomak z wieża Hitfist-30
Wyposażenie elektroniczne
Na wyposażenie elektroniczne moździerza samobieżnego Rak składają się:
-
celownik optoelektroniczny do strzelania na wprost z kamerą termowizyjną i dalmierzem laserowym
-
układ automatycznego naprowadzania działa na cel
-
system ładowania – możliwość ładowania w pełnym zakresie kątów obrotu
-
system wykrywania promieniowania laserowego Obra-3 SSP-1
-
komputer balistyczny z systemem SKO TOPAZ
-
system łączności wewnętrznej – FONET
-
przyrządy obserwacyjne dowódcy dzienno-nocne
-
system obserwacji dookrężnej
-
inercyjny system nawigacji TALIN 5000 z modułem GPS (oraz hodometrem zamontowanym w podwoziu)
-
system łączności zewnętrznej – radiostacja cyfrowa UKF RRC 9311 AP

Rosomak AWD
Kompanijny Moduł Ogniowy
Zestaw ogniowy Kompanijnych Modułów Ogniowych (KMO) 120-milimetrowych samobieżnych moździerzy Rak składa się z ośmiu moździerzy samobieżnych; dodatkowo pojedynczy KMO składa się także z czterech Artyleryjskich Wozów Dowodzenia (AWD), zbudowanych na bazie kołowego transportera opancerzonego Rosomak (analogicznie tak jak w nośniku moździerza), trzech Artyleryjskich Wozów Amunicyjnych (AWA), zbudowanych na bazie ciężarówki Jelcz 882.53 w układzie napędowym 8×8, jednego Artyleryjskiego Wozu Remontu Uzbrojenia (AWRU), zbudowanego na bazie pojazdu Jelcz P662D.35 oraz dwóch Artyleryjskich Wozów Rozpoznania (AWR), których prototyp znajduje się obecnie w fazie testów kwalifikacyjnych. AWR osadzony jest na zmodyfikowanym podwoziu bazowym transportera Rosomak.
Dane techniczno-taktyczne
-
Kaliber – 120 mm
-
Liczba luf – 1
-
Szybkostrzelność – od 6 do 8 pocisków na minutę
-
Zapas amunicji – 46 sztuk
-
Donośność maksymalna – 12 000 m
-
Czas osiągnięcia gotowości do strzelania – 30 s
-
Czas opuszczenia stanowiska ogniowego – 15 s






Rosomak AWD
Autor – zdjęcia: Dawid Kalka
Opole, 10. Brygada Logistyczna
Wykorzystanie w Wojsku Polskim: SM Rak są obecnie wykorzystywane w Wojsku Lądowym przez:
-
1. Batalion w Międzyrzeczu, 17. Brygada Zmechanizowana w Międzyrzeczu (11. Dywizja Kawalerii Pancernej) od czerwca 2017 roku.
-
7. Batalion w Wędrzynie, 17. Brygada Zmechanizowana w Międzyrzeczu (11. Dywizja Kawalerii Pancernej) od czerwca 2017 roku.
-
1. Batalion w Szczecinie, 12. Brygada Zmechanizowana w Szczecinie (12. Dywizja Zmechanizowana) od listopada 2017 roku.
-
2. Batalion w Giżycku, 15. Brygada Zmechanizowana w Giżycku (16. Pomorska Dywizja Zmechanizowana) od stycznia 2018 roku.
-
1. Batalion w Rzeszowie, 21. Brygada Strzelców Podhalańskich (18. Dywizja Zmechanizowana) od sierpnia 2018 roku.
-
5. Batalion w Przemyślu, 21. Brygada Strzelców Podhalańskich w Rzeszowie (18. Dywizja Zmechanizowana) od października 2018 roku.
-
1. Batalion w Orzyszu, 15. Brygada Zmechanizowana w Giżycku (16. Pomorska Dywizja Zmechanizowana) od lipca 2019 roku.
-
3. Batalion w Stargardzie, 12. Brygada Zmechanizowana w Szczecinie (12. Dywizja Zmechanizowana) od listopada 2019 roku.
-
Centrum Szkolenia Artylerii i Uzbrojenia im. gen. Józefa Bema w Toruniu od 2020 roku.
-
2. Batalion w Stargardzie, 12. Brygada Zmechanizowana w Szczecinie (12. Dywizja Zmechanizowana) od lipca 2021roku.
Rosomak M1 w Afganistanie, baza w Ghazni, 2010 rok
Podstawowe dane taktyczno-techniczne:
-
Produkcja – Rzeczpospolita Polska
-
Producent broni – Huta Stalowa Wola
-
Typ pojazdu – moździerz samobieżny
-
Trakcja wozu – kołowa, napęd 8 x 8
-
Załoga wozu – czterech żołnierzy
-
Opracowywanie wozów – lata 2008-2015
-
Produkcja – od 2016 roku
-
Liczba wyprodukowanych egzemplarzy – do października 2021 roku 82 egzemplarze
-
Zastosowany napęd – Scania D1 12 56A03PE o mocy 490 KM
-
Transmisja wozu – skrzynia przekładniowa ZF 7HP902S
-
Zastosowany pancerz – wieża: ARMOX 500T grubości 8 mm, STANAG 4569A poziom 1
-
Długość wozu – 7 800 mm

Rosomak M1 w Afganistanie, Polskie Siły Zadaniowe, 2012 rok
-
Szerokość wozu – 2 800 mm
-
Wysokość wozu – 2150 mm (kadłub wozu)
-
Prześwit kadłuba – 430 mm
-
Masa bojowa – 24 500 kg
-
Prędkość maksymalna – do 80 km/h
-
Zasięg wozu – do 500 km (inne dane mówią do maksymalnie 700 km)
-
Pokonywanie przeszkód terenowych:
-
Ścianki – o wysokości do 500 mm
-
Kat podjazdu – do 60 stopni
-
Przechył boczny – do 35 stopni
-
Uzbrojenie wozu:
-
Jednolufowy moździerz kalibru 120 mm
-
Uniwersalny karabin maszynowych UKM-2000D kalibru 7,62 mm
-
Wyposażenie dodatkowe wozu:
-
Wyrzutnie granatów dymnych kalibru 81 mm
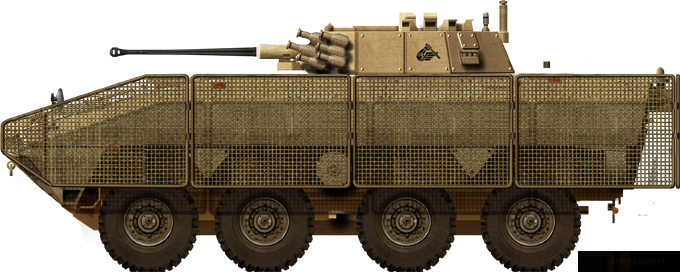
Rosomak M1M w Afganistanie, Polskie Siły Zadaniowe w bazie w Ghasny, 2012 rok
Inne wersje specjalistyczne
Wobec znacznych opóźnień w dostarczaniu wersji specjalistycznych, do eksploatacji w Wojsku Polskim trafił doraźnie dostosowany transporter opancerzony do przewozu obsług przeciwpancernych pocisków kierowanych, nazywany Rosomak-S (Spike). Pojazd został opracowany przez WZM S.A., w 2006 roku na podstawie umowy z listopada poprzedniego roku. Miał pełnić taką samą funkcję w pododdziale piechoty zmotoryzowanej, jak anulowana wersja Rosomak-1, transportera opancerzonego obsług wyrzutni przeciwpancernych pocisków kierowanych Spike-Lroku. Wnętrze transportera zostało przystosowane do przewozu wyrzutni przeciwpancernych, zdemontowano dwa siedziska w przedziale desantowym i wyposażono w dwa uchwyty dla zestawów Spike-Lroku. Prototyp posiadał obrotnicę na wkm kalibru 12,7 mm, jednak wozy, które były następnie dostarczone do jednostek bojowych nie posiadały własnego uzbrojenia. Łącznie w latach 2007-2008 przebudowano 27 wozów bazowych, na wersję Rosomak-S. Wozy te były traktowane jako rozwiązanie tymczasowe, aby następnie być przebudowanymi do wersji specjalistycznych.

Kolejnymi specjalistycznymi odmianami KTO powinny być pojazdy z rodziny wozów dowodzenia różnych szczebli, oznaczonych jako Rosomak-WD (Rosomak-WDST). W skład tej grupy powinny wejść dwie wersje wozów dowodzenia pododdziałów piechoty zmotoryzowanej i wsparcia – Rosomak-WD, wozy dowodzenia pododdziałów artylerii Rosomak-WDArt (Rosomak-AWD) i pojazdy dowodzenia obrony chemicznej. Wstępne wymagania taktyczno-techniczne na poszczególne odmiany pojazdów sformowano w 2005 roku i w listopadzie rozpoczęto postępowanie przetargowe w zakresie budowy odpowiednich wariantów Rosomaka-WD (wozy dowodzenia pododdziałów piechoty zmotoryzowanej, kompanii łączności i wsparcia – 35 sztuk, wozy dowodzenia artylerii i taktycznych zespołów kontroli obszaru powietrznego – 13 + 17 sztuk, wozy dowodzenia pododdziałów inżynieryjnych i chemicznych – 19 sztuk). Oferty wstępne włożono w marcu następnego roku, ale zostały wycofane z uwagi na zmiany z przedmiotowych założeniach. Po zakończeniu skorygowanych wymagań propozycje przedstawiły dwa konsorcja: Wojskowe Zakłady Łączności nr 1 i nr 2 oraz Centrum Naukowo-Produkcyjne Elektroniki Profesjonalnej RADWAR S.A. i WB Electronics S.A. W czerwcu 2006 roku wybrano tę ostatnią ofertę i rozpoczęto negocjacje, które jednak zostały zakończone bez podpisania odpowiedniej umowy.
W późniejszym okresie rozważano pozyskanie wozów dowodzenia na nośniku ze standardowym lub podwyższonym kadłubem. We wrześniu 2008 roku zaprezentowano demonstrator wozu dowodzenia na fińskim podwoziu XC-362. System platform z podwyższonym kadłubem, wyposażony zgodnie z wymaganiami polskiego sektora z urządzeniem łączności i dowodzenia z WB Electronics, Przemysłowego Instytutu Telekomunikacji S.A. (obecnie PIT-RADWAR S.A.) i Transbit Sp. Z.o.o. Kolejny demonstrator przygotowany w listopadzie tego roku we współpracy tych podmiotów i KenBiT Sp. Z.o.o. oraz Radiotechniki Marketing Sp. Zo.o. na bazie pojazdu ze standardowym kadłubem. We wnętrzu Rosomaka-WD umieszczono pięć stanowisk operatorskich z siedziskami antyudarowymi, z tego dwa wynośne, wyposażonych m.in.: w terminale z monitorami i komputery polowe oraz odpowiednie systemy informatyczne, łączności i dowodzenia. Prace nad tą odmianą Rosomaka zawieszono na etapie projektowym.

Na bazie pojazdu z rodziny WD miała powstać również rodzina wozów dowodzenia obroną przeciwlotniczą Rosomak-WD OPL z systemami dowodzenia pododdziałem Łowcza (szczebel dywizjonu przeciwlotniczego) i Rega (szczebel baterii przeciwlotniczej). Wstępne wymagania taktyczno-techniczne na te odmiany sformułowano do sierpnia 2006 roku, a wybranym podmiotem, który miał realizować budowę prototypów zostało Centrum Naukowo-Produkcyjne Elektroniki Profesjonalnej RADWAR S.A. (obecnie PIT RADWAR S.A.).
W latach 2010-2011, na mocy umowy z września 2009 roku na realizację pracy rozwojowej dotyczące kompanijnego modułu ogniowego moździerzy samobieżnych Rak, przygotowano pojazd dowodzenia Rosomak-AWD. Po przeprowadzeniu testów pojazd oczekiwał na zakończenie badań modułów i w kwietniu 2016 roku – wraz z umową na dostawy moździerzy samobieżnych Rak – zamówiono 32 artyleryjskie wozy dowodzenia Rosomak-AWD.






























































Rosomak Hitfist-30P
Wóz należący do 17. Wielkopolskiej Brygady Zmechanizowanej
Autor: Dawid Kalka
Drzonów – Piknik Militarny – Święto Wojska Polskiego 15. 08. 2020
Pododdziały Rosomaków miały być również wyposażone w wozy pomocy technicznej Rosomak-WPT, którego pozyskanie planowano już w pierwszej umowie z kwietnia 2003 roku. Prototyp WPT został zamówiony w ramach umowy o wykonanie pracy rozwojowej sygnowanej pomiędzy IU MON, a Rosomak S.A. Zgodnie z zapisami umowy prototyp Rosomaka-WPT miał zakończyć do końca 2017 roku wszystkie badania kwalifikacyjne. W 2018 roku przewidywano dostawę pierwszych maszyn Rosomak-WPT, które miały powstać o maszyny bazowe, które przekazał MON. Seryjny Rosomak-WPT posiada m.in.: żuraw, który umożliwia podniesienie każdego power-packa Rosomaka lub wierzy w warunkach polowych.
Drugą odmianą specjalistyczną Rosomaka związaną ze wsparciem eksploatacji tych pojazdów w warunkach polowych jest wóz WRT. Wymagania taktyczno-techniczne dla wozu rozpoznania technicznego Rosomak-WRT opracowano w 2008 roku, a opracowanie części wyposażenia specjalistycznego pojazdu zlecono Wojskowym Zakładom Motoryzacyjnym S.A. Demonstrator pojazdu powstał w trakcie pracy rozwojowej zleconej WZM S.A., przez Departament Polityki Zbrojeniowej MON umową z września 2009 roku. W jej ramach, na bazie przekazanego przez wojsko Rosomaka, w wersji bazowej, od września 2011 roku wykonano pierwszy egzemplarz pojazdu. Po przeprowadzeniu badań i wprowadzeniu zmian wynikających z protokołu z uwagami i zaleceniami oraz modyfikacji wymagań taktyczno-technicznych prototyp ten zmodyfikowano. W pracach brały też udział Wojskowe Zakłady Motoryzacyjne, ZM Bumar-Łabędy i OBRUM Gliwice. Pojazd w docelowej wersji zakończono w kwietniu 2014 roku, a w czerwcu przeprowadzono dalsze negocjacje z jednym oferentem, Inspektorat Uzbrojenia MON podpisał umowę na dostawę prototypu z Wojskowymi Zakładami Mechanicznymi i następnie 33 seryjnych Rosomaków w wersji WRT na lata 2016-2017, powstałych na bazie podwozi bazowych.

Załoga Polskiego Transportera Opancerzonego Wolvarine ćwiczy demontaż i zajęcie pozycji obronnych podczas ćwiczeń ogniowych na żywo w ramach ćwiczenia Steadfast Jazz na Poligonie Drawsko Pomorskie, Polska, 6 listopada 2013 roku
W pierwotnym programie zakładano również opracowanie dwóch wersji inżynieryjnych: wozu rozpoznania inżynieryjnego Rosomak-KTRI oraz wozu wsparcia inżynieryjnego Rosomak-KTWI. Wstępne analizy w realizacji KTO dla pierwszych z wersji, wykonano na bazie doświadczeń i danych taktyczno-technicznych dla Kołowego Transportera Rozpoznania Inżynieryjnego Tuja-K z października 2005 roku, który był podstawą budowy dla Rosomaka-KTRI, na bazie innego wozu 8×8 – KTO Ryś, ale w związku z ostatecznym zakończeniem prac nad ostatnim pojazdem, analiz dalszych nie kontynuowano.
Dalsze modyfikacje programu – wersje misyjne

Rosomak-S – wóz przewożący zespół przeciwpancernych z systemem Spike
W okresie od maja 2007 roku, do lutego 2008 roku MON zmieniło plany zakupów i harmonogram odbioru poszczególnych odmian pojazdów z rodziny Rosomak. Łączna liczba planowanych do pozyskania Rosomaków nadal wynosiła 693 sztuki, ale zostało zwiększone zamówienie na wersję bojowego wozu piechoty z 313 na 359 sztuk, co miało związek poniekąd z pewnymi zmianami etatowymi w pododdziałach planowanych do przezbrojenia w Rosomaki, a z drugiej strony poważne opóźnienia w realizacji rozwoju wersji specjalistycznych. Podtrzymano wcześniejszą decyzję o wyposażeniu w rozpoznawcze wersje Rosomak-R1 oraz Rosomak R-2 w wieże załogowe Hitfist-30P lub inne, bardziej analogiczne rozwiązanie (wieże bezzałogowe). W dalszym etapie ostatecznie zrezygnowano z pozyskania wersji Rosomak-1 oraz Rosomak-2 z zdalnie sterowanym stanowiskiem strzeleckim, natomiast rozpoczęto otwarte analizy z możliwością zainstalowania na bazie Rosomaka wież bezzałogowych, wyposażonych w mało kalibrowe armaty automatyczne, a wstępne zapotrzebowanie zostało określone na od 140 do 159 wozów w tej wersji. W ramach tego zamówienia planowano dostosowanie dodatkowych nowych 77 sztuk KTO-Rosomak wersji bwp do instalacji systemów dowodzenia dla plutonów, kompanii i batalionów piechoty zmotoryzowanej oraz pozyskanie nowych wersji pojazdu – wozu rozpoznania technicznego. Łączna liczba wozów z rodziny Rosomak w każdym batalionie piechoty zmotoryzowanej miała się powiększyć z liczby 75, do 88 pojazdów.

Rosomak WRT
Wnioski nabyte z doświadczeń bojowych z Iraku oraz Afganistanu, wykazały potrzebę opracowania silniej opancerzonego i lepiej wyposażonego KTO w wersji bojowej, dla nowego – rozbudowanego Polskiego Kontyngentu Wojskowego, który w 2007 roku zamierzano wysłać do drugiego z tych państw. W związku z tym, w grudniu 2006 roku, WZM oraz DZSZ MON podpisały umowę na opracowanie wersji ze wzmocnioną ochroną boków i tyłu przed bronią przeciwpancerną oraz części dennej przed improwizowanymi ładunkami wybuchowymi. Ta wersja Rosomaka miała zostać pozbawiona możliwości przekraczania przeszkody wodnej wpław. Założono, że nowy pojazd miał zapewnić ochronę balistyczną przez pociskami przeciwpancernymi kalibru 14,5 mm, a także przez głowicami kumulacyjnymi z starszych głowic RPG-7 z przodu kadłuba, jednak z uwagi na zbyt duży ciężar całego układu – 4500 kg – zrezygnowano z kompozycji pancerza pasywnego i reaktywnego. Ostatecznie wybrano tylko panele pancerza pasywnego izraelskiej firmy Rafael Advanced Defense Systems o masie 3500 kg. Zakupiono łącznie 57 takich pakietów opancerzenia w 2006 roku i dodatkowo kolejnych 30 sztuk trzy lata później. Część pierwszej partii systemu opancerzenia z Izraela trafiła od razu do PKW na terytorium Afganistanu. Dodatkowo odmiana tzw. afgańska, którą oznaczono jako Rosomak-M1, otrzymała akustyczny system do wykrywania i dokładnej lokalizacji stanowisk strzeleckich, dodatkową radiostację w zakresie KF, noże do cięcia lin-pułapek, dwie kamery do obserwacji bocznej pojazdu z monitorem w przedziale desantowym, dodatkowe pojemniki transportowe oraz pojemnik na drut ostrzowy pod przednią dolną płytą kadłuba wozu. W związku z znaczącym zwiększeniem masy pojazdu i przekroczeniem maksymalnej, dopuszczalnej masy dla możliwości bezpiecznego pływania wozy, w trakcie służby na terytorium Afganistanu zdjęto falochron z przodu i zdemontowano pędniki wodne maszyny. Pojazd przeszedł wszystkie próby odporności w 2007 roku i do końca 2008 roku przebudowano w ten sposób łącznie 51 egzemplarzy tego typu maszyn. 2009 roku WZM przygotowały drugą, zmodyfikowaną wersję tzw. afgańską – Rosomak-M1M. Opancerzenie dodatkowe kadłuba i wierzy w tej wersji wykonano ze stali Armstal oraz materiałów laminatowo-ceramicznych, w tym od firm Cenrex Sp. Zo.o. i Mikanit. W ramach bardzo pilnej potrzeby operacyjnej, zamówiono również osłony siatkowe przed pociskami kumulacyjnymi Qinetiq RP-GNet o masie całkowitej 320 kilogramów. Wozy w nowym standardzie posiadały zmniejszoną liczbę siedzisk dla żołnierzy desantu (z uwagi na potrzebę zachowania maksymalnej masy bojowej wozów KTO, usunięto dwa fotele położone najbliżej kosza wieży), dodano możliwość instalacji urządzeń do zakłócania detonacji zapalników min-pułapek i systemu śledzenia położenia wojsk BFT (Blue Force Tracking). 107 Rosomaków-M1M przekazano do PKW Afganistan w latach 2010-2011. Analogiczne zmiany zostały także wprowadzone w innych wersjach Rosomaków, które zostały wysłane na terytorium Afganistanu.

Rosomak WRT
Odmiany „misyjne”, czyli modernizacje czynione pod kątem wszelkich misji zagranicznych Wojska Polskiego kontynuowano nie tylko dla PKW Afganistan. Przygotowania do misji pokojowej European Union Force Chad/CAR w Republice Czadu i Republice Środkowoafrykańskiej w ramach PKW Czad, rozpoczętej przez polski kontyngent w marcu 2008 roku, był powodem modyfikacji pojazdów w zakresie zwiększania możliwości i obserwacji terenu przez kierowcę wozu oraz nowe urządzenia łączności zewnętrznej. Podobny zakres zmian objął opancerzone ambulanse oznaczone Rosomak-WEM-M. Misja w Afryce była również bezpośrednim przyczynkiem wprowadzenia Rosomaka w odmianie klasycznego transportera opancerzonego. Oto bowiem, w związku z rezygnacją zakupów zdalnie sterowanych stanowisk strzeleckich, pojazdy Rosomak-1 oraz Rosomak-2 w wariantach transportera opancerzonego z uzbrojeniem w postaci karabinów maszynowych nie zostały wdrożone. Dopiero na potrzeby polskiej misji wojskowej w Czadzie, WZM S.A., opracowany w 2008 roku – w ramach tzw. pilnej potrzeby operacyjnej – uzbrojoną odmianę transportera opancerzonego przeznaczoną do zadań logistycznych Rosomak-M2. Wyposażono go w częściowo opancerzoną obrotnicę OSS-M (opancerzone stanowisko strzeleckie – małe), przygotowaną przez AMZ-Kutno Sp. Z.o.o. i uzbrojoną opcjonalnie w karabin maszynowy, wielkokalibrowy karabin maszynowy lub granatnik samoczynny kalibru 40 mm. W tym czasie przebudowano do tego wariantu sześć maszyn i po zakończeniu działań PKW Czad i powrocie Rosomaków do kraju obrotnice zostały usunięte. Wobec dośc poważnych mankamentów OSS-M, firma AMZ-Kutno opracowała zmodyfikowaną obrotnicę z napędem elektrycznym oraz takim samym uzbrojeniem, znaną jako OSS-D (opancerzone stanowisko strzeleckie – duże). Tak skonfigurowany pojazd został nazwany jako Rosomak-M3. Do tego standardu zostało zmodyfikowanych 31 bazowych wozów KTO, przy czym jeden został przystosowany do przewozu bezzałogowych systemów rozpoznania Orbiteroku. W latach 2008-2011 część wozów tak zmodyfikowanych zostało wysłanych do PKW w Afganistanie, a po zakończeniu tej misji transportery zostały przekazane wybranym jednostkom liniowym SZ RP.
Dwie kolejne odmiany specjalistyczne Rosomaka zostały opracowane również w ramach potrzeby doraźnej DPZ MON, a nie w wyniku wcześniejszego planowania. Są to: pojazd rozpoznania i dozoru Rosomak-WSRiD (Wielosensorowy System Rozpoznania i Dozorowania) i wóz do nauki jazdy Rosomak-NJ. Pierwszaz wymienionych wersji Rosomaka, Wielosensorowy System Rozpoznania i Dozorowania, oznaczony jako Rosomak-WSRD, powstał na potrzeby ochrony baz PKW w Afganistanie w ramach pilnej procedury operacyjnej. Wymagania taktyczno-technicznej na WSRiD zaakceptowano w grudniu 2009 roku i po zrealizowaniu założeń i studium wykonalności rozpoczęto w czerwcu następnego roku postępowania przetargowego w sprawie dostawy dwóch kompletów wyposażenia, który miało być zamontowane na transporterach bazowych. Umowę z wybranym konsorcjum Wojskowego Instytutu Łączności S.A. i Elbit Ekectronics o konwersji dwóch transporterów bazowych Rosomak-M2 w wersję rozpoznania i dozoru Departament Zaopatrywania Sił Zbrojnych MON podpisał w listopadzie 2010 roku, a dostawę pojazdów zrealizowano w roku następnym. Rosomak-WSRD otrzymał wysuwany maszt z odpowiednimi sensorami, wynośne przyrządy rozpoznawcze oraz zestaw bezzałogowych aparatów rozpoznawczych klasy mini. Dwa pierwsze pojazdy zostały odebrane w 2012 roku. Drugi z wariantów, wóz do nauki jazdy Rosomak-NJ, został w ramach pracy rozwojowej z 2010 roku, wynikającej z dość pilnej potrzeby szkolenia kierowców w prowadzenia wozów Rosomak-M1M, cięższych i szerszych od standardowego KTO Rosomak. Demonstrator wozu opracował Ośrodek Badawczo-Rozwojowy Urządzeń Mechanicznych w myśl zawartej w sierpniu 2010 roku umowy DPZ MON z WZM w roku następnym do standardu Rosomak-NJ przebudowano cztery wozy bazowe.

Rosomak AWD
Dalsze modyfikacje
Ocena eksploatowanych w SZ RP Rosomaków już po kilku latach spowodowała sformułowanie wniosków odnośnie do modyfikacji samego transportera, jak i jego wyposażenia. Producent, na podstawie konsultacji z użytkownikiem, wprowadzał liczne ulepszenia i poprawki. W 2008 roku rozpoczęto próby nowych przyrządów obserwacyjnych opracowanych przez PCO S.A. – PNK-B (peryskop noktowizyjny kierowcy) Skawa i ruchomej głowicy o zwiększonym polu widzenia w płaszczyźnie horyzontalnej oraz PNK-TV (peryskop noktowizyjny kierowcy – telewizyjny) z ruchomą głowicą oraz dwoma torami optoelektronicznymi: nocnym z pasywnym wzmacniaczem obrazu i dziennym z kamerą CCD oraz monitorem w przedziale dowódcy. PCO S.A. w latach 2011-2013 opracowała także nową kamerę obserwacyjną KDN-1 Nyks, oświetlacze laserowe do nocnego podświetlenia otoczenia, ułatwiające prowadzenie w nocy pojazdu przy użyciu starszych przyrządów typu PNK-72 Radomka oraz nową kamerę termowizyjną KLW-1 Asteria, w 2015 roku rozpoczęto wymianę standardowej kamery termowizyjnej Tilde-FC, stosowanego w celownikach wieży Rosomaka na KLW-1. Poza tym Wojskowe Zakłady Inżynieryjne S.A., w 2011 roku opracowały kasety systemu poprawy wyporności pojazdów, które mogły być zamontowane z boków kadłuba Rosomaka.

Rosomak WD
Ponadto w latach 2010-2011 WZM S.A. we współpracy z OTO-Melara przygotowały prototyp wieży Hitfist-30P-2, wyposażoną w opancerzoną wyrzutnię z dwoma przeciwpancernych pocisków kierowanych Spike-LR – masa samej wieży zwiększyła się do około 2950 kg. Wprowadzone przez Departament Polityki Zbrojeniowej MON, rozmowy z WZM w trybie negocjacji z jednym wykonawcą zakończoną jednak bez żadnego zamówienia wież dla kolejnych planowanych egzemplarzy . W 2015 roku resort obrony narodowej podjął decyzję o rezygnacji z wyposażenia w wieże Hitfist-30P w przeciwpancernych pocisków kierowanych. Obecnie ten temat ponownie powrócił i być może w przyszłości Rosomaki z nowymi wersami wieży Hitfist zostaną wyposażone w zestawy przeciwpancernych pocisków kierowanych.
Jednocześnie jeszcze w marcu 2011 roku opracowano wstępne wymagania taktyczno-techniczne na następcę wież załogowych, czyli zdalnie sterowany system wieżowy z zestawem przeciwpancernych pocisków kierowanych Spike-Lroku. W grudniu tego roku Polski Holding Obronny Sp. Z.o.o., zawarł z ZM Bumar-Łabędy umowę na prace projektowe bezzałogowego systemu wieżowego, wpisującego się w te wymagania. W styczniu 2013 roku projekt ten został zakończony – przyczyną takiej decyzji – przyczyną takiej decyzji Inspektoratu Uzbrojenia MON było uznanie, że proponowana koncepcja realizacji systemu wieżowego została opracowana na podstawie gotowego projektu wieży Hitfist-OWS (Overhead Weapon Station), a nie polskiego projektu. Instytut Uzbrojenia MON jako wykonawcę nowego projektu wybrał konsorcjum Huty Stalowa Wola i WB Electronics i w marcu 2013 roku podpisano umowę o realizacji pracy badawco-rozwojowej ZSSW-30 (Zdalnie Sterowanego Systemu Wieżowego), z armatą automatyczną kalibru 30 mm i podwójną wyrzutnią przeciwpancernych pocisków kierowanych. Termin zakończenia prac był kilkukrotnie przesuwany, obecnie prototypy ZSSW-30 przechodzą testy, a finalizację wszystkich badań i testów poligonowych ma nastąpić w najbliższym czasie.






Rosomak WD
Autor – zdjęcia: Dawid Kalka
Opole, 10. Brygada Logistyczna
Podsumowanie programu Rosomak
Ostatecznie w pierwotnym harmonogramie czasowym w latach 2004-2013, zrealizowano dostawę 570 pojazdów Rosomak, z tego 359 maszyn w wersji bwp, w odmianie z wieżą Hitfist-30P i 211 pojazdów bazowych. Redukcja ilości zakupionych transporterów wiązała się z cięciami wydatków bieżących MON w wyniku kryzysu finansowego w 2008 roku, pozostałe pojazdy z pierwszego9 zamówienia wojsko otrzymało w latach 2014-2015.Ponadto 27 sztuk Rosomaków-S w przejściowej wersji do przewozu przeciwpancernych pocisków kierowanych Spike-LR ma zostać wycofanych i przebudowanych na inne wersje specjalistyczne po wprowadzeniu pojazdów z ZSSW-30.

Rosomak-M1
W lipcu 2013 roku WZM S.A. i Patria zawarły nowe porozumienia dotyczące dalszej produkcji AMV 8×8 w Polsce, sprzedaży i modernizacji lub modyfikacji tej konstrukcji na kolejne 10 lat oraz serwisowania i napraw do 2052 roku. Otworzyło to drogę do drugiego polskiego kontraktu na Rosomaki. W październiku 2013 roku siemianowickie zakłady podpisały z Inspektorem Uzbrojenia MON umowę na dostawę kolejnych 307 wozów w latach 2014-2019 na kwotę 1,653 mld PLN. Pojazdy te miały pozostać wykonane w postaci bazowej, a następnie wyposażone, jako bojowe wozy piechoty, z nową bezzałogową wieżą ZSSW-30 (122 sztuk), bojowe wozy rozpoznawcze w odmianie dowódczej Rosomak R-1 (61 sztuk) i liniowej Rosomak R-2 (27 sztuk) oraz służyć do zabudowy kolejnych odmian specjalistycznych: nośniki dla wieży moździerza samobieżnego SMK-120 Rak (80 sztuk), artyleryjskie wozy dowodzenia Rosomak-AWD (43 sztuki), wozy dowodzenia Rosomak-WD1, Rosomak-WD2 i Rosomak-WD3 BMS, wozy dowodzenia obroną przeciwlotniczą Rosomak-WD OPL Łowcza (3 sztuki) i Rosomak-WD OPL Rega (9 sztuk), wozy rozpoznania technicznego Rosomak-WRT (33 sztuki, jeden pojazd dostarczony w ramach poprzedniej umowy), wozy pomocy technicznej Rosomak-WPT (17 sztuk) oraz wozy rozpoznawania skażeń Rosomak-RSK (11 sztuk).
Warto podkreślić, że w latach 2004-2013, czyli pierwotnym czasie realizacji program KTO, do uzbrojenia weszła zasadniczo tylko jedna, docelowa i wyprodukowana w większej ilości odmiana specjalistyczna Rosomaka – wóz ewakuacji medycznej. Nie wdrożono pojazdów technicznych, wozów rozpoznawczych, dowodzenia i moździerza samobieżnego. Stąd w zatwierdzonym w grudniu 2012 roku „Planie modernizacji technicznej SZ RP na lata 2013-2022” uwzględniono, że program KTO w latach 2014-2022 pochłonie dalsze 7,86 mld PLN, z czego tylko w latach 2014-2016 zaplanowano 2,77 mld PLN. Tym razem planowanie uwzględniło już nie tylko same pojazdy, ale także ich koszty eksploatacji, co określa się jako program operacyjne. Poza kosztami 307 bazowych Rosomaków, pojazdów dowodzenia, moździerzy samobieżnych Rak i wozów technicznych, dodatkowe środki mają być przeznaczone na wieże bezzałogowe, przeciwpancernych pocisków kierowanych, amunicję czy części zamienne, ale także na systemy szkolenia załóg Rosomaków czy system wsparcia pododdziałów bojowych, np. zakupy CKWEiRT (Ciężkiego Kołowego Wozu Ewakuacji i Ratownictwa Technicznego), IU MON prowadzi także prace nad pozyskaniem systemu SZWSB (System Zarządzania Walką Szczebla Batalionu), zwanego także Rosomak BMS (Battle Management System), początkowo dla pięciu batalionów piechoty zmotoryzowanej wyposażonych w bwp Rosomak z wieżami Hitfist-30P.

Łącznie po zakończeniu dostaw drugiej serii transporterów SZ RP mogłyby mieć do 359 bojowych wozów piechoty Rosomak z Hitfist-30P (bez uwzględnienia strat bezpowrotnych z Afganistanu w postaci ośmiu bwp oraz nieznanej liczby wież), 122 wozy bojowe piechoty Rosomak z wieżą ZSSW-30, 27 bojowe wozy rozpoznawcze Rosomak R-1 oraz 61 wozów Rosomak R-2 z ZSSW-30, dwa wozy rozpoznania i dozorowania Rosomak-WSRiD, 64 moździerze samobieżne SMK-120 Rak, trudną dziś do sprecyzowania liczbę wozów dowodzenia szczebla taktycznego Rosomak-WD1 i Rosomak-WD2, 32 wozy dowodzenia kompanii wsparcia Rosomak-AWD, trzy wozy dowodzenia obrony przeciwlotniczej Rosomak-WD OPL łowcza, dziewięć wozów dowodzenia obrony przeciwlotniczej Rosomak-WD OPL Rega, 39 wozów ewakuacji medycznej Rosomak-WEM, 34 wozy rozpoznania technicznego Rosomak-WRT, 17 wozów pomocy technicznej Rosomak-WPT, 11 wozów rozpoznania skażeń Rosomak-RSK, cztery wozy do nauki jazdy Rosomak-NJ.
Aktualnie proces wdrażania wozów z rodziny Rosomak nie jest uznany za zakończony, gdyż wciąż w dalszym opracowaniu pozostaje kilka odmian specjalistycznych, w tym bojowy wóz piechoty z wieżą bezzałogową, odmiany wozów dowodzenia szczebla taktycznego, dwie odmiany wozów dowodzenia pododdziałami przeciwlotniczymi, pojazdy wsparcia technicznego i rozpoznania skażeń. Z dwoma pierwszymi wersjami, ich wprowadzenie jest uwarunkowane pozytywnym zakończeniem i wprowadzeniem do służby systemu wieży bezzałogowej ZSSW-30, czy systemem zarządzania polem walki BMS (Battle Management System), jednak w przypadku wozów technicznych czy rozpoznawania skażeń, samo opóźnienie wynika z m.in.: z problemem ze zdefiniowaniem wyposażenia specjalistycznego dla tych wersji.

Opis Techniczny
Rosomak występuje w dwóch zasadniczych odmianach: wersja bazowa przeznaczona do transportu osób oraz specjalistycznego sprzętu oraz jako wersja bojowa, która jest wyposażona w obrotową wieżę z uzbrojeniem. Opis techniczny będzie przedstawiał pojazd bazowy Rosomak. Bojowy Wóz Piechoty oraz inne wersje specjalistyczne to faktycznie pojazdy wykorzystujące wóz bazowy, z zabudowaną wieżą lub zdalnie sterowanym systemem uzbrojenia i wyposażeniem zadaniowym. Załoga składa się z dwóch lub trzech ludzi:dowódcy, kierowcy oraz działonowego. W wersji bazowej oraz bojowej z wieżą z armatą małokalibrową pojazd może przewozić do ośmiu żołnierzy desantu z ich wyposażeniem, siedzących po obu stronach kadłuba, twarzami do siebie.
Wspornik zawieszenia i kadłubem

Rosomak-M1M
Transporter ma klasyczny układ przedziałów kadłuba – z przodu z lewej strony znajduje się stanowisko kierowcy z indywidualnym włazem z prawej strony umieszczono przedział napędowy, w środkowej części oraz tylnej znajdują się odpowiednio: przedział bojowy i przedział transportowy, połączone korytarzykiem z przedziałem kierowania. Załadunek, jak i wyładunek żołnierzy lub wyposażenia jest realizowany za pomocą dwuskrzydłowych, niesymetrycznych drzwi tylnych oraz/lub dwóch luków w stropie tylnej części kadłuba. Każda skrzydło drzwi jest zawieszone na dwóch zawiasach z zapadką zabezpieczającą. Dodatkowo kierowca ma do swojej dyspozycji własny luk wejściowy, również zamontowany na stropie, wyposażony dodatkowo w wysuwaną szybę do jazdy w warunkach inne niż bojowe.
Układ nośny Rosomaka to wspornik układ zawieszenia Sisu Axles, czyli rama stalowa w postaci wydłużonej kratownicy nośnej, która jest podstawowym elementem siłowym konstrukcji, przenosi część obciążeń i zapewnia sztywność układu (układ pół-niosący). Wspornik układu zawieszenia składa się z dwóch części o kształcie ceowym z blach połączonych poprzecznikami i śrubami. Kadłub jest mocowany do wspornika układu zawieszenia za pomocą czterech gumowych połączeń elastycznych. Do wspornika są mocowane wszystkie pozostały zasadnicze elementy pojazdu: układ zawieszenia kół, elementy układu kierowniczego, przekładnie główne i pośrednie. Pojazd może zostać wyposażone w dodatkowe elementy osłony dolnej części zintegrowanego wspornika układu zawieszenia.

Afganistan – polska baza wojskowa
Opisany układ teoretycznie umożliwia na łatwiejsze dokonywanie zmian w konstrukcji nadwozia podczas przeprowadzanych remontów czy modernizacji, zwiększa wytrzymałość kadłuba na wybuchy ładunków pod pojazdem, jednak w praktyce sama wymiana elementów konstrukcyjnych, czy podatność na modernizacje nie est wcale większa niż w innych konstrukcjach tego typu na świecie.
Kadłub pojazdu jest samonośną konstrukcją skorupową, spawaną ze płyt pancernych ze stali walcowanej o grubości 8 mm. Standardowo, do kadłuba zasadniczego wozu jest mocowany w odległości 35 mm, przy pomocy połączeń śrubowych. Jest to pancerz dodatkowy na który składają się płyty stali pancernej o grubości 6 mm. Pusta przestrzeń pomiędzy oby dwoma pancerzami to tzw. przestrzeń powietrzna, dylatacja powietrzna, która sama także może być wypełniona np. specjalną pianką zwiększającą wyporność wozu podczas pływania. Aby zwiększyć ochronę balistyczną wozu, zamiast standardowych płyt pancernych, można montować inny typ modułowego pancerza, który zawiera elementy stalowe, ceramiczne i elementy laminowane, które można montować tak, aby odpowiednio zwiększyć ochronę balistyczną wozu na wybranych kierunkach. Dno kadłuba wozu jest podwójne i wypełnione odpowiednim materiałem absorbującym (pochłaniającym). Do wykonania kadłuba jest stosowana stal SSAB Armox 440T/450T,, a do wykonania pancerza zewnętrznego Armox 500T, a od 2010 roku wykorzystywana jest stal (w odpowiedniej kolejności): HSJ Armstal 450 i Armstal 550.

Kadłub Rosomaka w wersji podstawowej zapewnia odporność na poziomie 4 według NATO-wskiej normy STANAG 4569 w części czołowej w zakresie kątów +/- 60 stopni na przebicie pociskiem przeciwpancerno-zapalającym kalibru 14,5 x 114 mm z odległości 200 metrów lub wybuchu pocisku artyleryjskiego kalibru 155 mm eksplodującego w odległości od 25 m oraz odporność na poziomie 3 według STANAG 4569/A w pozostałych sektorach (boki, tył, strop) na przebicie pociskiem przeciwpancernym kalibru 7,62 x 54 mm z odległości 30 m lub na wybuch pocisku artyleryjskiego kalibru 155 mm eksplodującego w odległości 60 m. Odporność przeciwminowa kadłuba to ochrona przed ładunkiem wybuchowym o masie do 6 kg eksplodującym pod dnem pojazdu na poziomie 2B według STANAG 4569/B. Wnętrze pojazdu jest wyłożone wykładziną przeciwodłamkową z laminatu aramidowego Lim-M lub zbliżonego.
Zawieszenie pojazdu
Rosomak ma niezależne zawieszenie każdego koła w postaci podwójnych wahaczy trójkątnych Spicer mocowanych za pomocą sworzni do zintegrowanego zawieszenia z siłownikami hydropneumatycznymi, na których gaz oraz płyn są odpowiedzialne odpowiednio za resorowanie i amortyzację wstrząsów oraz umożliwiają regulację prześwitu dwóch położeniach – górnym (jazda) lub dolnym (transport). Wahacze lewej i prawej strony pojazdu są lustrzanym odbiciami. Skok elementów zawieszenia wynosi 450 mm. Regulacji prześwitu w zakresie 200 – 250 mm może następować ze stanowiskiem kierowcy.





Układ hamulcowy pojazdu to system hydrauliczny, dwuosobowy firmy Gnott. Dodatkowy, osobny obwód na hamulec postojowy. Elementami układu hamulcowego są mechaniczna pompa hamulcowa generująca ciśnienie hamowania (płynu), awaryjna elektryczna pompa hamulcowa, układy sterujące, moduł hamowania, hamulce kół i hamulec postojowy. Elektryczna pompa hamulcowa działa jako pompa awaryjna systemu. Wszystkie obwody hamulcowe mają swoje akumulatory ciśnieniowe (hydroakumulatory). Hamulce kół z tarczami wentylowanymi, z czterokołowymi zaciskami hamulcowymi – podwójnymi na pierwszej i drugiej osi pojazdu, pojedynczy na pozostałych. Hamulec postojowy tarczowy, działający na pierwszym i czwartym moście napędowym. Kiedy układ pozostaje bez ciśnienia, hamulec postojowy działa, natomiast w przypadku awarii układu, może on zostać odblokowany mechanicznie.
Rosomak ma dwie pierwsze osie sterowane, a układ kierowniczy składa się z mechanicznej przekładni kierowniczej ze wspomaganiem hydraulicznym i podwójnego mechanizmu zwrotniczego. Ciśnienie hydrauliczne układu kierowniczego wytwarzane jest przez napędzaną od silnika pompę układu wspomagania. W przypadku awarii silnika i konieczności holowania wozu, włączana jest pomocnicza pompa układu kierowniczego, zblokowana ze skrzynią rozdzielczą – pompa wytwarza ciśnienie hydrauliczne, wymagane do wspomagania układu hydraulicznego, a napęd pompy realizowany jest od obracających się kół. Na desce rozdzielczej kierowcy umieszczono czujnik położenia kół kierowanych. Mechanizmy kierownicze, kierownica i pedały mogą być podnoszone lub opuszczane, wraz z zmianą położenia siedziska kierowcy.




























Pojazd z 17. Wielkopolskiej Brygady Zmechanizowanej
Autor – zdjęcia: Dawid Kalka
Skarbimierz Osiedle, Święto Wojska Polskiego 13.08.2023
Koła w rozmiarze 14.00R20 z oponami z wkładkami Hutchinson typu run flat umożliwiającymi pokonywanie bez powietrza w oponie dystansu około 40 km i centralnym układem regulacji ciśnienia w oponach. Ponadto zastosowany układ pompowania kół ma cztery ustawienia ciśnienia kół sterowany przez kierowcę: Emergency (poziom 1), Mud/Sand & Snow (poziom 2), Cross County (poziom 3), Highway (poziom 4). System regulacji ciśnienia działa na zasadzie pomiaru prędkości wozu – po osiągnięciu przez Rosomaka odpowiedniej prędkości, układ po jednej minucie automatycznie dopompowuje oponę o jeden poziom wyżej.
Układ napędowy i przeniesienia mocy
Napęd stanowi czterosuwowy, sześciocylindrowy, rzędowy silnik wysokoprężny typu Scania D1 12 56A03PE, chłodzony cieczą, z bezpośrednim wtryskiem paliwa i turbodoładowaniem ze sprężarką napędzaną gazami spalinowymi oraz między-stopniową chłodnicą powietrza dolotowego (intercooler). Zasilanie paliwem jest realizowane przy pomocy pompo-wtryskiwaczy typu PDE. Pojemność silnika wynosi 11,7 dm3, stopień sprężania 18:1. Jednostka napędowa Rosomaka może być sterowana przez kierowcę pedałem przyśpieszenia, ale także ręcznie, w przypadku np. korzystania z wyciągarki. Silnik ma wstępny podgrzewacz Ebelspracher Hydronic D10W zasilany elektrycznie lub przy pomocy paliwa, umieszczony w przedniej części przedziału silnika.

Rosomak M-3
Zasilanie powietrzem silnika jest realizowane przez układ powietrzny, regulujący ilość i czystość dostarczanego do cylindrów powietrza. Składa się z: kanału dolotowego w przedziale napędowym, z wlotem w pokrywie nad silnikowej, zamykanego pneumatycznie klapą; filtra powietrza z czujnikiem zatkania; turbosprężarki; intercoolera oraz płomieniowych świec rozruchowych. Układ filtra powietrza umieszczony jest w przedniej części przedziału silnikowego i składa się z dwóch filtrów: cyklonowego i papierowego. Pierwszy z nich jest filtrem wstępnym, a filtr papierowy jest podzespołem dokładnego oczyszczania. Po przejściu układu napędowego i jezdnego w tryb pływania lub po wyłączeniu silnika układ zasilania powietrzem jest automatycznie zamykany, aby zapobiec dostawaniu się do układów silnika wody. Dodatkowo samo zamknięcie może nastąpić przez kierowcę pedałem umieszczonym w przedziale kierowania. Powietrze wlotowe do silnika może zostać podgrzane za pomocą dwóch świec płomieniowych umieszczonych w kolektorze ssącym pomiędzy sprężarką, a głowicami cylindrów.
Moc maksymalna silnika bez ograniczeń, tzw. w reżimie overboots, wynosi 360 kW (483 KM) przy 2100 obr/min., a z ograniczeniami mechanicznymi – 294 kW (400 KM) przy tej samej prędkości obrotowej jest osiągana przy odpowiednich ustawieniach układu sterowania dawką paliwa, powodujących wyższe osiągi, kosztem zwiększonego zużycia paliwa oraz zwiększenia zawartości szkodliwych związków w spalinach wylotowych. Przy mocy maksymalnej 360 kW (483 KM) moment obrotowy wynosi 1970 Nm, przy 1500 obr/min. W trybie ustawień, przy których spaliny spełniają wszystkie odpowiedni wymogi Euro 3, osiągana moc i moment obrotowy są niższe – odpowiednio 294 kW (400 KM) i 1670 Nm przy 1500 obr/min. Kierowca steruje silnikiem przy pomocy pedału przyspieszenia oraz przełącznika wyboru zakresu mocy wyjściowej umieszczonego na pulpicie kierowcy, silnik może być także sterowany przy pomocy ręcznej przepustnicy. Układ wydechowy silnika jest zakończony tłumikiem z osłoną, która zapobiega przedostawaniu się wody do tłumika. Wylot tłumika skierowany jest w górę pojazdu.

Rosomak M-3
Układ chłodzenia Ametek Airscrew składała się z dwóch chłodnic z wentylatorami pomp płynu chłodzącego, termostatu silnika, zbiornika wyrównawczego, czujników temperatury płynu chłodzącego oraz przełącznika wentylatorów. , czujników temperatury płynów chłodzącego oraz przełącznika wentylatorów. Wentylatory są napędzane hydraulicznie, a ich prędkość obrotowa jest ustawiana w zależności od temperatury płynu chłodzącego silnika i oleju w układzie hydraulicznym. Chłodzenie podczas pływania odbywa się również poprzez układ chłodzenia silnika, powietrzem dostarczanym do komory silnika bądź poprzez wlot w przedniej części kadłuba zaopatrzony w kominek zapobiegające jego zalewaniu.
Układ paliwowy Rosomak jest złożony z dwóch zasadniczych zbiorników paliwa, układów przepompowywania paliwa, zbiornika pośredniego filtrów paliwa, separatora wody, układu pomiaru ilości paliwa, przełącznika wyboru zbiornika paliwa. Zbiorniki główne o łącznej pojemności 275 dm3 (135 dm3 oraz 140 dm3), są umieszczane w tylnej części kadłuba pojazdu w rogach przy zewnętrznej krawędzi. Wlewy do paliwa znajdują się na płycie stropowej kadłuba. Każdy z zbiorników ma zainstalowany czujnik zbiorników paliwa, który kontroluje stan ilości paliwa w zbiornikach i uruchamia odpowiednią pompę układu przepompowywania paliwa, kiedy paliwo w zbiorniku się kończy. Pompy przepompowujące są zabudowane w tylnej-dolnej części kadłuba pojazdu. Zbiornik pośredni paliwa o pojemności 29 dm3, który znajduje się w przedniej części przedziału silnikowego. Łączna pojemność wszystkich zbiorników paliwowych w Rosomaku wynosi więc 325 dm3. Ewentualne wtrącenie się pewnej ilości wody do zbiornika paliwowego, jest odpowiednio niwelowane przez separator umieszczony przed wejściem do zbiornika paliwa pośredniego w przedziale napędowym. Czujnik temperatury zbiornika pośredniego steruje podgrzewaczem filtra umieszczonym przed wtryskiwaczem w celu zapobieżenia osadzaniu się parafin w paliwie w warunkach zimowych. Przełącznik wybory zbiornika paliwa, używany jest do jednoczesnego wyboru zbiornika i układu przetłaczającego, znajduje się w przedziale kierowcy.

PKW Afganistan
Układ sterowniczo-regulacyjny silnika EMS dopasowuje zasilanie paliwem i monitoruje temperaturę płynu chłodzącego silnika oraz dopasowuje dawkę wtryskiwanego paliwa i ogranicza maksymalną liczbę obrotów w stanie zimnym silnika. Jeśli silnik nagrzeje się nadmiernie, jego moc maksymalna jest wtedy ograniczona w celu zapobieżenia wszelkim uszkodzeniom. System sterowania pracą silnika jest połączony ze skrzynią biegów poprzez szynę CAN. System mikroprocesorowy kontroluję pracę silnika oraz dozowanie paliwa we wszystkich stanach pracy. Układ sterowania EMS monitoruje i porównuje chwilowy stan silnika podczas każdego cyklu pracy. Na jej podstawie wtryskiwanego do każdego z cylindrów w celu utrzymania równej pracy silnika, reguluje ciśnienie i temperaturę powietrza doładowującego.
Silnik jest zblokowany z automatyczną skrzynią przekładniową ZF Friedrichshafen AG 7HP 902 S Ecomat z siedmioma przełożeniami do przodu oraz jednym do tyłu. Skrzynia biegów składa się z następujących elementów: przekładnia hydrokinetyczna, przekładnia planetarna, zwalniacz, przekładnia awaryjna, dwa wałki odbiorcze i pompa pomocnicza. Zmiana biegów odbywa się samoczynnie przy pomocy siłowników elektrohydraulicznych. Skrzynia biegów ma także hydrauliczne sterowany retarder z siedmioma przełożeniami, obsługiwany jedną dźwignią, znajdującą się przy kierownicy. W przypadku awarii układu automatycznej przekładni skrzynią można sterować ręcznie – w trybie awaryjnym można włączyć jedno przełożenie do ewakuacji pojazdu. Pompa awaryjna skrzyni biegów umożliwia holowanie pojazdu z wyłączonym układem napędowym, z uwagi na to, że jest napędzana od poruszających się kół, dzięki temu możliwy jest także rozruch Rosomaka poprzez pociągnięcie go na holu. Elektroniczny układ sterujący skrzyni biegów EST 146 S współdziała z innymi jednostkami sterującymi poprzez magistralę CAN.
Silnik z układem chłodzenia, skrzynią biegów i chłodnicą oleju przekładniowego zblokowany jest w jeden zespół, tzw. power-pack o masie w stanie suchym około 990 kg. Wymiana power-packa w warunkach polowych trwa znacząco krócej niż jedną godzinę – wymaga to jednak dość sprawnej i odpowiednio wyszkolonej grupy trzech mechaników. Powinni oni być wyposażeni w m.in.: żuraw o odpowiednim udźwigu, specjalistyczne zawieszenie, klucze pneumatyczne, dedykowany stend do umieszczenia zespołu silnik-przekładnia oraz podnośnik hydrauliczny do otwarcia i podtrzymywania płyty przedziału silnikowego.



KTO Rak – wozy i amunicja
Układ przeniesienia napędu składa się ze skrzyni rozdzielczej, przekładni głównych, zwolnic oraz wałów napędowych łączących elementy napędu. Moc z silnika i skrzyni biegów przenoszona jest na jednobiegową skrzynię rozdzielczą Katsa S300 umieszczoną pomiędzy drugą, a trzecią osią pojazdu. Jest wyposażona w mechanizm różnicowy wzdłużny z możliwością blokowania, sterowany pneumatycznie, pozwalający na użytkowanie różnych prędkości między kołami dwóch przednich, a dwóch tylnych osi pojazdu. Zablokowanie mechanizmu różnicowego wzdłużnego wymusza takie same obroty na wszystkich mostach (kołach) napędowych pojazdu, co pozwala zwiększyć manewrowość manewrowość wozu w trudnych warunkach terenowych (poruszanie się po śniegu, w błocie, pokonywanie wzniesień czy śliskich podjazdów). Przekładnie główne stożkowe Sisu Axles przekazują moc na wały kardana Spicer i dalej wałami napędowymi RF KK Doppel na piasty kół. Przekładnie główne, drugiej i trzeciej osi są typu przelotowego, umożliwiającego przeniesienie mocy ze skrzyni rozdzielczej na przekładnie główne id pierwszej i czwartej. Przekładnie główne mają uruchamiane pneumatycznie, poprzecznie stożkowe mechanizmy różnicowe o zmniejszonym tarciu wewnętrznym, pozwalające na uzyskanie różnych wartości prędkości obrotowych obu kół danej osi. Kierowca steruje blokadą mechanizmu różnicowego wzdłużnego skrzyni rozdzielczej oraz blokadami osiowymi mechanizmów różnicowych za pomocą odpowiednich przełączników na pulpicie kierowcy. Półosie napędowe, nieobciążone, posiadają klasyczne wały napędowe z przegubami ze zmienną i stałą prędkością kątową, które przekazują moc na przekładnie mechaniczne piast (zwolnice) Sisu Axles redukujące prędkość obrotową, jednocześnie zwiększając przy tym moment napędowy na kołach.
Instalacje pojazdu

Stanowisko strzeleckie “Kobuz”
Układ elektryczny prądu stałego składa się z: czterech akumulatorów (dwóch w przedziale kierowania i dwóch w wieży wozu), alternatora, wyłącznika głównego, wyłączników obwodów oraz okablowania. Zadaniem układu jest generowanie i dostarczanie energii elektrycznej do podzespołów pojazdu, magazynowanie energii elektrycznej wystarczającej do uruchomienia silnika oraz ładowania akumulatorów. Napięcie robocze wynosi 24 V lub 12 V w przypadku niektórych podzespołów (silnik ustawia wysokość reflektorów, radio, przekaźnik kontrolki ładowania, gniazda wyjściowe). Istnieje także możliwość połączenia zasilania z zewnętrznego źródła o napięciu 230 V, np. do ładowania akumulatorów. Pojazd ma główny wyłącznik prądu oraz osobny wyłącznik do wieży. Oświetlenie wewnętrzne przedziału kierowania i załogowego oraz system przeciwpożarowy i przeciwwybuchowy mają odrębne obwody.
Układ pneumatyczny pojazdu wytwarza sprężone powietrze dla: układu centralnego pompowania kół, sterowania mechanizmami różnicowymi, układów zamykania klapy powietrza wlotowego i sterowania powietrzem wylotowym z przedziału załogi, osuszania peryskopu kierowy i kamery cofania, a także zwalniania bębna wyciągarki. Układ składa się ze sprężarki napędzanej od silnika Rosomaka oraz rozdzielacza wody i oleju napędowego z regulatorem ciśnienia i zaworem bezpieczeństwa. Do układu pneumatycznego można dołączyć za pomocą specjalnego gniazda narzędzia pneumatyczne.

Rosomak-M3 – wersja z obrotnicą
VI Zmiana – PKW Afganistan
Rosomak posiada dwa układy hydrauliczne z jednym zbiornikiem oleju. Pierwszy układ hydrauliczny służy do kontroli systemu chłodzenia silnika i jest napędzany pompą napędzaną od silnika, natomiast drugi, wtórny układ, wytwarza ciśnienie hydrauliczne do napędu wyciągarki, napędów pędników śrubowych oraz jest napędzany poprzez pompę hydrauliczną z przekładni pośredniej pojazdu o wydajności zależnej od obciążenia silnika.
Przyrządy obserwacyjne

Kołowy transporter opancerzony Rosomak M1M w Afganistanie
Kierowca ma szerokokątny peryskop pryzmatyczny lub zamienne dzienno-nocny przyrząd obserwacyjny PNK-72 Radomka, wsteczną kamerę manewrową umiejscowioną nad drzwiami desantowymi, z której obraz przekazywany jest na monochromatyczny wyświetlacz w przedziale kierowania (korzystanie z niego jest możliwe po opuszczeniu fotela w pozycji jazdy z zamkniętym włazem) oraz elektrycznie ustawiane i podgrzewane lusterka elektryczne. W czasie jazdy z otwartym włazem do włazy kierowcy można zamontować szybę przednią z dwoma bocznymi szybkami. W prawym skrzydle drzwi tylnych jest jest umieszczony peryskop optyczny, drugi taki peryskop jest zamocowany na stropie kadłuba w jego tylnej części, z lewej strony. Rosomak w wersji bazowej, jest wyposażony w siedzisko dowódcy, za miejscem kierowcy z indywidualnym włazem dla niego, dowódca może prowadzić obserwację otoczenia dzięki czterem peryskopom optycznym lub dzienno-nocnego przyrządu obserwacyjnego POD-72 Liswarta zamiennie z przednim peryskopem. Wszystkie peryskopy załogi są podgrzewane i zabezpieczone prze wiązkami promieniowania laserowego. Peryskop kierowcy, kamera tylna oraz szyba kierowcy są wyposażone w spryskiwacze do mycia i układ osuszania, a wszystkie peryskopy i szyba przednia kierowcy są podgrzewane.
Wyposażenie standardowe

Rosomak posiada odrębne systemy diagnostyczne – dla zespołu napędowego, podgrzewacza silnika, układu hamulcowego, układu kierowniczego i systemu centralnego układu pompowania kół. Pojazd został wyposażony w napędzaną hydraulicznie wyciągarkę Katsa P90 lub Borimex o sile uciągu 90 kN i liną o długości 50 m. Wyciągarka zamocowana jest do lewej burty pojazdu, poniżej linii pancerza dodatkowego i możliwe jest wyprowadzenie liny zarówno do przodu, jak i do tyłu. Podczas trwania ewakuacji pojazdu można równocześnie używać napędu kół. Kadłub Rosomaka ma zaczepy do holowania i podnoszenia pojazdu. KTO posiada także zestaw świateł drogowych i postojowych, kierunkowskazy, światło cofania, światło przeciwmgielne, a także oświetlenie konturowe i specjalne Notek.
Wyposażenie do pływania składa się z: rozkładanego hydraulicznie falochronu z osłonami, pędników śrubowych napędzanych hydraulicznie z rewersem, układu żaluzji systemu chłodzenia oraz trzech pomp zęzowych (z tego dwie są umieszczone w przedziale silnikowym, jedna w przedziale kierowcy), a także zaworów odwadniających w kadłubie. Zmiana kierunku pływania następuje poprzez różnicowanie obrotów śrub pędników, a ich prędkość obrotowa jest regulowana poprzez sterowanie prędkością obrotową silnika. Chłodzenie podczas pływania odbywa się poprzez układ chłodzenia silnika owiewany powietrzem dostarczanym do komory silnika z wnętrza pojazdu lub poprzez wlot powietrza na przedniej, górnej części kadłuba, zamykany kominkiem zapobiegającym dostawaniu się wody do ogólnego systemu. Układ pływania jest uruchamiany przy pomocy włącznika, który wprawia w ruch silnik hydrauliczny oraz zamyka klapę powietrza wlotowego. Klapa powietrza wlotowego silnika wlot do kanału wlotowego powietrza w pokrywie przedziału silnika, a powietrze jest pobierane z przedziału silnika. Pompy odwadniające oraz klapy powietrza chłodzącego są przełączane w tryb czuwania za pomocą wyłącznika i rozpoczynają pracę automatycznie, kiedy poziom wody dosięga czujnika poziomu wody. Maksymalna masa pojazdu pozwalająca bezpiecznie pływać w przypadku KTO w wersji bazowej wynosi 21 000 kg, a bojowej – 22 500 kg.

Pokonywanie przeszkody wodnej
Kierowca pojazdu dysponuje urządzeniami sterującymi (kierownica, pedały, dźwignie), pulpitem z wyświetlaczem wielofunkcyjnym, monitorem wstecznej kamery manewrowej, wskaźnikami, wyłącznikami i przełącznikami, radioodbiornikiem, pulpitem sterującym regulacją wysokości pojazdu, pulpitem sterowania centralnego układu pompowania kół.
Wykrywanie i lokalizację pożaru wewnątrz pojazdu, jak również ochronę wozu i członków załogi przed eksplozją wewnętrzną, zapewnia gaśnicza instalacja przeciwwybuchowa i przeciwpożarowa Deugra (obecnie Kidde-Deugra), w której skład wchodzą: blok sterowania, wyłącznik ręczny, 10 (12 w wersji bojowej) czujników optycznych i trzy (pięć w wersji bojowej) butle ze środkiem gaśniczym w przedziale załogi oraz w przedziale silnikowym i wieży.

Pokonywanie przeszkody wodnej
Z kolei głównym zadaniem systemów ogrzewania, klimatyzacji i filtrowentylacji Fazer jest zapewnienie wystarczającej ilości oczyszczonego powietrza o odpowiedniej temperaturze tak, by wewnątrz pojazdu panowała stała temperatura niezależnie od warunków atmosferycznych otoczenia. Układ wentylacyjny i ochrony przed bronią masowego rażenia składają się z: filtra cyklonowego, filtra typu ABC (filtr F-170, fitropochłaniacz EP-170 lub FP-M), wentylatora powietrza i zaworów. Powietrze z otoczenia jest zasysane poprzez wlot na dachu pojazdu i przechodzi poprzez filtr cyklonowy i ABC do przedziału załogi. Zabezpieczenie wnętrza pojazdu jest osiągane poprzez wytworzenie nadciśnienia zapobiegającemu przedostawaniu się zanieczyszczonego powietrza przez wszelkie mikro nieszczelności w kadłubie. Układy ogrzewania i klimatyzacji składają się z modułu grzejnego i klimatyzacji oraz kanałów wentylacyjnych. W przedziale kierowcy znajduje się osobny moduł grzewczy.
System ochrony przed efektami użycia broni masowego rażenia obejmuje automatyczny sygnalizator skażeń Pimco Cherdes (Chemical Radiological Detection System) lub Cherdes-II. W skład urządzenia wchodzi układ poboru powietrza, przyrząd do wykrywania skarzeń chemicznych Smiths GID-3, przyrząd do określania mocy dawki promieniowania gamma i wykrywania skażeń promieniotwórczych Polon Alfa DPO (w Cherdes-II dwie sondy ZP-1) oraz blok do wykrywania bliskich wybuchów jądrowych Pimco BDWJ (w Cherdes-II dodatkowo pulpit z wyświetlaczem). GID-3 umozliwia wykrywanie fosforoorganicznych i parzących bojowych substancji toksycznych, DPO (ZP-1) wykrywa i określa moc dawki promieniowania gamma w zakresie od 0,1 վμSy/h do Sy/h, jak również włączanie wewnętrznego sygnału alarmowego po przekroczeniu ustalonej dawki promieniowania, a BDWJ pozwala na wykrywanie bliskich eksplozji jądrowych w odległości nie większej niż 5000 m oraz automatycznie – w przypadku wykrycia takiej eksplozji jądrowej – wyłącza silnik i zamyka wszystkie otwory powietrza do pojazdu i uruchamia pirotechniczny układ ochrony oczu przez impulsem świetlnym UOW Pandora dla dowódcy i działonowego. Cherdes zapewnia także wewnętrzną sygnalizację w przypadku zagrożenia bronią masowego rażenia i przekazuje sygnał alarmowy z GID-3 i DPO do instalacji wozu w celu uruchomienia urządzenia filtrowentalacyjnego.
KTO Rosomak Rak
Pojazd z 17. Wielkopolskiej Brygady Zmechanizowanej
Autor – zdjęcia: Dawid Kalka
Skarbimierz Osiedle, Święto Wojska Polskiego 13.08.2023
Łączność
Pojazd ma radiostację typu Radmor RRC-9500 zakresu UKF, służącą do utrzymania dwukierunkowej łączności z innymi pojazdami na postoju oraz w czasie ruchu. Radiostacja pracuje w zakresie częstotliwości 30 do 87,975 MHz z minimalnym odstępem kanałów 25 kHz (łącznie 2320 kanałów) w systemie simpleks i może być stosowana w różnych konfiguracjach, np. do transmisji mowy lub jako stacja retranslacyjna. Może być wyposażona w słuchawkę ETT 110-14A, głośnik HPA 111-14 lub HPE 108, programator danych RRC-9724, mikrotelefon TRC 9750, terminal taktyczny TRC 9710A, kabel retransmisyjny CBF 209 lub zewnętrzny szyfratoroku. Urządzenie ma funkcję poszukiwania wolnego kanału i zabudowany indywidualny moduł utajniający. Ponadto radiostacja może prowadzić nasłuch wywoławczej częstotliwości ogólnej w trybie pracy na określonej częstotliwości oraz prowadzić nasłuch poszczególnych częstotliwości wywoławczych każdego z siedmiu zaprogramowanych kanałów. Łączność wewnętrzna jest zapewniona przez WB Electronics PZUŁW (pokładowy zestaw urządzeń łączności wewnętrznej) Fonet, który składa się z modułu centralnego Komut-10TA, pulpit łączności wewnętrznej (uniwersalne CZS-2FFS i końcowe CZS-2CS) z zestawami nagłownymi PZSM-03F, pulpit końcowego złącza telefonicznego i alarmowego CZS-2TS, terminala sygnalizacji komend LIOD-F, głośnika wewnętrznego CZS-2G. Są one podłączone do Komut-10TA w systemie gwiaździstym, są przez nie zasilane i sterowane, co pozwala na określenie roli i rodzaju poszczególnych elementów (pulpitów) członków załogi. Centralnym urządzenie systemu jest komputer Komut-10TA z mikroprocesorem RISC, wykonującym funkcję przetwarzania i komunikacji mowy oraz realizujący połączenia dla przesyłu transmisji danych pomiędzy elementami Foneta, a także sterowania radiostacji RRC-9500. System pozwala również na pracę przez zewnętrznie środki łączności: radiostacje pokładowe np. PNR 500, linię przewodową z PZUŁW Fonet wyższego szczebla, zewnętrzne linie telefoniczne MB lub CA. Fonet zapewnia również każdemu członkowi załogi pojazdu możliwość pracy na stanowisku odległym, po podłączeniu dowolnego elementu systemu przy użyciu kabla polowego PKL o długości do 1200 m. System jest wyposażony w układ automatycznej regulacji siły głosu w słuchawkach w zależności od poziomu zakłóceń akustycznych w pojeździe. Do podłączania zewnętrznych środków komunikacyjnych, w tym centrali automatycznej, polowego aparatu telefonicznego lub pulpitu zdalnego sterowania, służy tablica przyłączy liniowych znajdująca się na zewnątrz z tyłu po lewej stronie pojazdu pod zbiornikiem paliwa.

Wóz dowodzenia AWD
Orientowanie w terenie i nawigacji są możliwe przy pomocy niezależnego systemu nawigacyjnego Honeywell TALIN 3000. Urządzenie jest stosowane do prowadzenia pojazdu według wyznaczonych punktów trasy, określenia położenia wozu i wyznaczenia azymutu. System składa się z czujnika ruchu pojazdu VMS z napędem od czujnika prędkości zblokowanego ze skrzynią biegów bloku nawigacji inercyjnej INU z żyroskopami laserowymi i akceleratorami oraz modułu sterowania i odbiornikiem nawigacji satelitarnej Hertz HGPST-T i anteną oraz monitora (INU ma interfejsy z szyną RS-422 do odbierania danych). TALIN 3000 jest przeznaczony do nawigowania według wyznaczonych punktów trasy, wyznaczania położenia pojazdu i określania azymutu.
|
Dane taktyczno-techniczne Kołowego Transportera Opancerzonego Rosomak |
|
|
Masa własna pojazdu (kg) |
19 500 |
|
Masa bojowa pojazdu w wersji bazowej (hg) |
21 000 |
|
Masa bojowa pojazdu z wieżą Hitfits-30P (kg) |
22 500 |
|
Długość całkowita (mm) |
7880 |
|
Rozstaw osi (mm) |
1400/1700/1450 |
|
Rozstaw kół (mm) |
2450 |
|
Szerokość całkowita (mm) |
2830 |
|
Wysokość bez wieży (mm) |
2390 |
|
Wysokość z wieżą (mm) |
3270 |
|
Prześwit (mm) |
430 |
|
Prędkość maksymalna na drodze utwardzonej (km/h) |
120 |
|
Prędkość maksymalna pływania do przodu z falochronem podniesionym (km/h) |
10,5 |
|
Prędkość maksymalna pływania do przodu – falochron złożony |
6,6 |
|
Prędkość maksymalna pływania do tyłu (km/h) |
3,3 |
|
Zasięg operacyjny po drodze utwardzonej (km) |
600 |
|
Średnie zużycie paliwa (droga utwardzona) pprzy mocy normalnej (dm3/100 km) |
57,1 |
|
Średnie zużycie paliwa (droga utwardzona) pprzy mocy maksymalnej (dm3/100 km) |
58 |
|
Promień skrętu (m) |
12 |
|
Zdolnośc pokonywania wzniesień (stopni) |
60 |
|
Przechył boczny (stopni) |
53 |
|
Pokonywanie przeszkód pionowych (m) |
0,7 |
|
Pokonywanie przeszkód wodnych brodzeniem (m) |
1,5 |
|
Zakres temperatury otoczenia (stopni C) |
-30/+40 |
Systemy uzbrojenia
– wieża Hitfist-30P

Rosomak w wersji bojowego wozu piechoty jest wyposażony w załogową wieżę Hitfist-30P, opracowaną przez Oto-Melara (obecnie koncern Leonardo-Finmeccanica). Spawany kadłub wieży jest wykonany z aluminium. Ściany zostały wykonane z płyt o konstrukcji kompozytowej o grubości od 17 mm w części podstawy, 20 mm w części stropowej i do 25 mm z przodu i po bokach, co gwarantuje w części przedniej w zakresie kątów ±60 stopni odporność na poziomie 4 według STANAG 4569/A przebicie pociskiem przeciwpancernym rdzeniowym kalibru 14,5 mm x 114 mm z odległości od 200 m lub wybuchu pocisku artyleryjskiego kalibru 155 mm eksplodującego z odległości 25 m oraz w pozostałych sektorach (boki, tył, strop) na poziomie 3 według STANAG 4569/A przebicie pociskiem przeciwpancernym kalibru 7,62 x 54 mm z odległości 30 m lub wybuchu pocisku artyleryjskiego kalibru 155 mm, eksplodującego z odległości od 60 m. Połączenie Hitfist-30P z kadłubem i ruch obrotowy wierzy w zakresie 360 stopni zapewnia uszczelnione łożysko, składające się z aluminiowych wałeczków i czterech bieżni oraz koło zębate. Kosz wieży, który wykonany jest ze stopów lekkich z ramą oraz platformą, jest zamykany pokrywami oddzielającymi od przedziału bojowego, wewnątrz kosza znajdują się regulowane w pionie siedziska załogi. Wymiary wieży: długość całkowita z armatą 4770 mm, długość bez armaty 2580 mm, szerokość 2300 mm, wysokość całkowita nad stropem kadłuba 885 mm, wysokość do osłony głowicy celownika 595 mm, wysokość kosza 1115 mm, średnica kosza 1436 mm. Załoga wieży składa się z dwóch osób: dowódcy i działonowego.
Wewnątrz wieży znajdują się stanowiska załogi, uzbrojenie, przyrządy obserwacyjne i system kierowania ogniem, zespoły sterowania systemem uzbrojenia i wieżą, urządzenia systemu łączności i pulpit systemu samoobrony pojazdu. W stropie umieszczono otwieranie do tyłu włazu działonowego znajduje się otwór głowicy celownika. Za włazami jest zamocowana cylindryczna podstawa czujnika meteorologicznego i dwa wsporniki do mocowania anten. Z przodu wieży po lewej stronie umieszczono wyrzutnie granatów dymnych zblokowane w jeden moduł, z prawej strony znajduje się tunel i luk wyrzutu ogniw taśmy amunicji armatniej oraz otwór wydmuchu gazów strzelniczych. Prostokątnych otwór z przodu włazu działonowego mieści zespół celownika dzienno-nocnego. Wokół wieży są rozmieszczone głowice systemu ostrzegania o opromieniowaniu laserem.

Wokół włazu dowódcy rozmieszczonych jest łącznie osiem peryskopów optycznych, zapewniających 360-stopniowe pole obserwacji, wyposażonych w filtr przeciw-laserowy. Peryskopy dowódcy są wyposażone w układ przywołania, który pozwala na obrót wierzy w sektor widzenia danego przyrządu. Działonowego ma jeden peryskop optyczny o polu widzenia 360 stopni. Wszystkie peryskopy mogą być chowane do wnętrza wieży, np. na czas transportu lotniczego. Masa wieży bez załogi, wyposażenia wymiennego i amunicji wynosi 2410 kg, a masa bojowa z pełną jednostką ognia 2900 kg.
Wieżę wyposażono w pulpit sterowania systemu uzbrojenia, umieszczony pomiędzy stanowiskami dowódcy i działonowego. Może on być wykorzystywany przez obu członków załogi. Za pomocą pulpitu steruje się układami systemu kierowania ogniem uzbrojenia podstawowego i pomocniczego oraz układem ruchu wieży i uzbrojenia. Załoga ma do swojej dyspozycji dwa 10-calowe monitory służące do wyświetlania obrazu z przyrządów obserwacyjno-celowniczych i konsole z manipulatorami służące do sterowania ruchami wieży i mechanizmami wykonawczymi uzbrojenia. Monitor działonowego ma funkcję kontroli wszystkich funkcji celownika dzienno-nocnego.

Bazowy Rosomak, Siemianowice Śląskie
Uzbrojeniem zasadniczym wieży jest armata samoczynna Orbital ATK Mk. 44 Bushmaster II kalibru 30 mm x 173 mm, napędzany łańcuchem poruszanym silnikiem elektrycznym lub awaryjnie ręcznie, z możliwością regulacji szybkostrzelności (ogień pojedynczy, seria, seria z ograniczeniem do pięciu pocisków) i z licznikiem wystrzałów. Lufa armaty bruzdowana o długości 2701 mm (L/90) z tłumikiem płomienia i odrzutu. Masa armaty wynosi 153,1 kg. Zasilanie armaty taśmowe, a zapas amunicji w dwóch magazynach wynosi 200 naboi; pierwszy magazyn 121 naboi, drugi – 79 naboi. Łuski nabojów są wyrzucane przez otwór po prawej górnej stronie nad armatą. Z armatą jest sprzężony karabin maszynowy ZM Tarnów UKM-2000C (wz. 2000C Rod), kalibru 7,62 x 51 mm, działający na zasadzie odprowadzenia części gazów prochowych przez boczny otwór w lufie. Masa broni wynosi 10,5 kg. Zapas amunicji karabinowej wynosi 700 naboi, a wyrzut łusek następuje do pojemnika wewnątrz wieży wraz z ogniwami taśmy.
Armata wraz z karabinem maszynowym umieszczona jest na wspólnym łożu, które umożliwia prowadzenie ognia w zakresie kątów elewacji od -5 do +60 stopni i jest odizolowana od przedziału załogi w celu lepszego zabezpieczenia przed wydostawaniem się gazów prochowych. Łożę jest umieszczone w kołysce, a z przodu posiada ruchomą osłonę. Kołyska z wieżą jest połączona za pomocą dwóch łożyskowanych podpór, przekładnia zębata lewej podpory sprzęga się z wałkiem zębatym mechanizmu podniesienia, realizując ruch uzbrojenia w płaszczyźnie pionowej. Układ obrotu wierzy w azymucie i uzbrojenia w elewacji składa się z zespołu sterowania układami regulacji nadążnej i silników elektrycznych z przekładniami redukcyjnymi, ruch jest możliwy ręcznie za pomocą odpowiednich pokręteł. Prędkość ruchu uzbrojenia w pionie wynosi od 0.5 mrad/sek do 0.5 rad/sek, z maksymalnym przyśpieszeniem 1 rad/sek2, natomiast prędkość obrotu wierzy w poziomie wynosi od 0.5 mrad/sek, do 1 rad/sek, z maksymalnym przyśpieszeniem 1 rad/sek2. Układ stabilizacji uzbrojenia wieży Hitfist-30P składa się z: żyroskopów i przetworników, podających sygnały do przekładni redukcyjnych napędu wieży oraz uzbrojenia. Dokładność naprowadzanego uzbrojenia podczas ruchu wynosi około 0.8 mrad, przy prędkości poruszania się pojazdu z prędkością do 20 km/h.

Rosomak M-2
Do strzelania z armaty stosuje się zasadniczo amunicję ZM Mesko. Nabój przeciwpancerny NM225 z podkalibrowym pociskiem przeciwpancernym stabilizowanym brzechwowo ze smugaczem służy do zwalczania celów opancerzonych, w odległości do 4000 m i posiada penetrator wolframowy (ciężkie spieki wolframu), ze stalowymi brzechwami oraz odrzucany aluminiowy sabot. Zdolność penetracji jednej płyty stalowej RHA, ustawionej pionowo jest określana na 95-100 mm, z odległości 1000 m (schemat dwóch płyt pancernych o wysokiej twardości, o grubości 10 mm oraz jednej homogenicznej o grubości 30 mm, a ustawionych od siebie w odległości 60 mm, ustawionych pod kątem 60 stopni, z odległości 1000 m). Nabój z pociskiem wielozadaniowym NM222 ze smugaczem i samolikwidatorem jest przeznaczony dl zwalczania celów nieopancerzonych lub lekko opancerzonych w odległości do 3000 m i składa się z pocisku stalowego, który jest wypełniony materiałem wybuchowym PBXN-5. Zapalnik zapewnia działanie ze zwłoką, przebijanie lekkich osłon pancernych i terenowych, fragmentację i efekt zapalający. Zdolność penetracji płyty stalowej RHA ustawionej pod kątem 60 stopni jest określana jako 10 mm, w odległości 1000 m. Fragmentacja pocisku w celu, po przebiciu płyty duraluminiowej o grubości 2 mm, ustawionej pod kątem 60 stopni w odległości 1000 m. Natomiast nabój szkolny NM219 ze smugaczem posiada stalowo-aluminiowy pocisk bez ładunku wybuchowego. Wszystkie naboje posiadają stalowe łuski.
|
Amunicja kalibru 30 mm do armaty Mk. 44 |
Nabój z podkalibrowym pociskiem przeciwpancernym stabilizowanym brzechwowo ze smugaczem (APFSDS-T) |
Nabój z pociskiem wielozadaniowym ze smugaczem i samolikwidatorem (MP-T/SD) |
Nabój szkolny ze smugaczem (TP-T) |
|
Oznaczenie fabryczne |
NM225 |
NM222 |
NM219 |
|
Masa naboju (g) |
710 |
835 |
835 |
|
Masa pocisku (g) |
227,5 |
363 |
363 |
|
Masa rdzenia (g) |
141,3 |
– |
– |
|
Masa materiału miotającego (g) |
227,5 |
148 |
148 |
|
Długość naboju (mm) |
281 |
290 |
290 |
|
Długość pocisku (mm) |
173 |
173 |
173 |
|
Ciśnienie gazów prochowych (MPa) |
460-520 |
460-520 |
460-520 |
|
Prędkość początkowa pocisku (m/s) |
1430±15 |
1070±15 |
1070±15 |
|
Czas palenia się smugacza (s) |
1,5 |
4,7 |
4,7 |
|
Czas działania samolikwidatora (s) |
– |
6,7±2 |
– |
Do strzelania z karabinu maszynowego UKM-2000C stosuje się 7,62 x 51 mm naboje z pociskami: zwykłym z rdzeniem ołowianym, przeciwpancernym, przeciwpancerno-zapalającym, smugowym, o długości naboju 71 mm, masie 23,2-24,5 g, długość pocisku 28-34,7 mm i masie 9,1-9,45 g oraz prędkości początkowej 825-860 m/s, a także nabój ćwiczebny (tzw. ślepy). Naboje mają łuski stalowe lub mosiężne.

Rosomak Rak
Wieża Rosomaka ma także system ostrzegania i samoobrony SSP-1KTO Obra-3KTO z czterema głowicami detekcyjnymi rozmieszczonymi na bocznych ścianach wieży (obejmują one pole widzenia na poziomie w 360 stopniach, a w pionie w zakresie -6 do +30 stopni) oraz trzema dwulufowymi wyrzutniami WGD-1 (902A) dla granatów dyspersyjnych GAK-81 lub GM-81, kalibru 81 mm. Obra-3KTO zapewnia wykrywanie oraz sygnalizację opromieniowania pojazdu przez impulsowy dalmierz lub oświetlacz laserowy i postawienia gęstej zasłony dymnej na kierunku, z którego nastąpił impuls. System ma trzy tryby odpalania wyrzutni: ręczny, półautomatyczny i automatyczny. Zasięg odpalenia granatu wynosi 5-40 m, powierzchnia zasłony dymnej wynosi od 35 do 120 m2.
Strzelanie z armaty i karabinu maszynowego zapewnia system celowniczy wyposażony w dzienno-nocny celownik Kollsman DNRS-288 z kamerą termowizyjną, kamerą dzienną i dalmierzem laserowym połączony elektronicznie z uzbrojeniem oraz systemem kierowania ogniem. Umożliwia on wykrycie, namierzanie celu oraz określenie jego wartości kątowej i odległości, w sektorze od -10 do +60 stopni w elewacji i w całym 360-stopniowym zakresie obrotu wieży. Celownik Kollsman DNRS-288 składa się, z zespołu głowicy peryskopu, kamery dziennej, kamery termowizyjne Galileo Avionica (obecnie Leonardo-Finmeccanica) Tilde-FC, zintegrowanego z głowicą dalmierza laserowego oraz interfejsu z systemami wieży. Zespół głowicy peryskopu jest urządzeniem optycznym o 12-krotnym powiększeniu, które zapewnia całe zobrazowanie w okularze celownika (z siatką balistyczną dla wszystkich typów amunicji) z toru optycznego z kamery dziennej, kamery termowizyjnej oraz jest mechanicznie połączony z uzbrojeniem. Pole widzenia wynosi od 4 do 10 stopni w dzień. Kamera termowizyjna jest chłodzoną w obiegu zamkniętych matrycę z detektorem 288 x 4 czujników podczerwieni pracującą w paśmie 8-14 µm z cyfrowym przetwarzaniem obrazu. Kamera dzienna ma matrycę CCD 752 x 582 z cyfrowym przetwarzaniem obrazu. Obraz z kamery termowizyjnej może być wyświetlany w szerokim polu widzenia (12 x 6 stopni), służący do wykrywania celów lub w wąskim polu widzenia (2,4 x 1,5 stopni), przeznaczony do śledzenia i ostrzału celu, obraz z kamery dziennej ma stałą ogniskową do 1200 m. Dalmierz laserowy jest bezpieczny dla oczu urządzeniem klasy 3A, działającym w paśmie 1,54 µm, o zasięgu pomiaru od 200 do 9995 m, z dokładnością ±5 m (z możliwością ustawienia odległości ostrzegawczej w przedziale 200-8000 m) i niskiej lub średniej powtarzalności impulsu. Zmierzona odległość jest wyświetlana równocześnie w okularze celownika DNRS-288 oraz na monitorach dowódcy i działonowego. W skład systemu kierowania ogniem wchodzi także układ czujników – czujnik meteorologiczny (temperatura i ciśnienie powietrza, kierunek i prędkość wiatru), czujnik układu wieży (kąt podniesienia uzbrojenia, przechylenie poprzeczne uzbrojenia, prędkość obrotu wierzy w azymucie, prędkość ruchu uzbrojenia w elewacji), czujnik temperatury ładunku prochowego i moduły sterowania nimi oraz przelicznik wypracowujący obliczenia balistyczne. Wymagane prawdopodobieństwo trafienia w cel o wymiarach 4,6 m x 2,3 m w odległości 1500 m wynosi co najmniej 70% dla poruszającego się z prędkością 20 km/h, a stabilizacja linii celowania pozwala na śledzenie celów na dystansie do 3000 m. W wieży przed stanowiskiem działonowego znajduje się awaryjny celownik optyczny uzbrojenia głównego.











































KTO Rosomak Hitfist-30
Wóz należący do 17. Wielkopolskiej Brygady Zmechanizowanej
Autor – zdjęcia: Dawid Kalka
Olsztyn (województwo Śląskie), Święto Wojska Polskiego 15.08.2023
– zdalnie sterowane stanowisko strzeleckie Kobuz
Zdalnie sterowane stanowisko strzeleckie ZSMU-1276 A3 Kobuz zostało opracowane w ZM Tarnów S.A. W jego skład wchodzą podstawa z łożyskiem, kołyska broni, łoże uzbrojenia, układy napędowe w elewacji i azymucie z przekładniami redukcyjnymi, układy sterowania napędami, układ zasilania w amunicję, zespoły sterowania, obserwacji i celowania. Masa stanowiska w pełnym ukompletowaniu z karabinem maszynowym wynosi 155 kg. ZSMU-1276 A3 jest obsługiwane przez jednego operatora dysponującego pulpitem Arex PUL-04 z 10,4 calowym wyświetlaczem wielofunkcyjnym oraz manipulatorem sterowniczym. Wymiary modułu: długość 1160 mm, szerokość 860 mm, wysokość 686 mm.
Podstawa obrotowa stanowiska z uzbrojenia integruje wszystkie jego podstawowe układy mechaniczne oraz zapewnia naprowadzanie uzbrojenia w azymucie w zakresie kątów n x 360 stopni. Kołyska jest przeznaczona do montażu i sterowania uzbrojeniem oraz zespołu celowniczego. Zakres ruchu uzbrojenia w elewacji wynosi od -5 do +50 stopni.
Uzbrojeniem ZSMU-127 A3 jest karabin maszynowy UKM-2000C z układem adaptacyjnym, elektrospustem i mechanizmem przeładowania. Zapas amunicji karabinowej wynosi 250 naboi w wymiennej skrzynce amunicyjnej umieszczonej w wieszaku. Napędy sterowania stanowiskiem w elewacji elektryczne z przekładniami do sterowania oraz awaryjne ręczne. Prędkość ruchu uzbrojenia w pionie wynosi od 1 mrad/s do 1,5 rad/s, z maksymalnym przyśpieszeniem 2,5 rad/s2, natomiast prędkość obrotu wierzy w pionie – od 1 mrad/s do 2,8 rad/s, z maksymalnym przyśpieszeniem 2,5 rad/s2. Stanowisko jest wyposażone w układ stabilizacji – dokładność naprowadzania uzbrojenia wynosi 2,5 mrad przy poruszaniu się pojazdu z prędkością 20 km/h. Moduł sterowniczy zawiera połączenie ze spustem i na przelicznik balistyczny, układ zliczania pocisków i programowania długości serii.
ZSMU-1276 A3 jest wyposażony w dzienno-nocny układ obserwacyjno-celowniczy z głowicą PCO ZMO-1. Głowica integruje kamerę termowizyjną, zespół kamer dziennych i dalmierz laserowy. Kamera termowizyjna ma niechłodzoną matrycę 640 x 480, pracującą w paśmie 8-12 µm z cyfrowym przetwarzaniem obrazu oraz obiektywy kącie pola widzenia 14 x 10,3 stopni (zakres ogniskowania od 20 m) lub 4,5 x 3,5 stopni (zakres ogniskowania od 100 m) z dwukrotnym lub czterokrotnym powiększeniu. Kamera telewizyjna ma matrycę CCD o rozdzielczości 1440 x 1080, z obiektywem o kącie pola widzenia 14 x 10,2 stopni (zakres ogniskowania od 5 m) lub 4 x 3 (zakres ogniskowania od 250 m). Dalmierz laserowy jest bezpiecznym dla oczu urządzeniem klasy 1, pracującym w paśmie 1,55 µm, o zasięgu pomiaru od 10 do 5000 m, z dokładnością do ±1 m oraz niskiej lub średniej powtarzalności impulsu.

– system wieżowy z moździerzem kalibru 120 mm
System wieżowy MAHSW z moździerzem kalibru 120 mm został opracowany w Hucie Stalowa Wola S.A. Konstrukcja wieży spawana z blach stalowych, poziom ochrony balistycznej wynosi 1, według STANAG 4569/A – odporność na przebicie pociskiem przeciwpancernym kalibru 7,62 x 39 mm, z odległości 30 m, lub wybuch pocisku artyleryjskiego kalibru 155 mm, z odległości 100 m. Załogę wieży stanowi dwóch żołnierzy: dowódca oraz celowniczy – obaj siedzą w wieży po lewej stronie. Dowódca dysponuje wieżyczką obserwacyjną z włazem. W tylnej ścianie korpusu umieszczono dwa luki do załadunku amunicji kalibru 120 mm. Kosz wieży z ramą i platformą jest zamykany pokrywami oddzielającymi od przedziału bojowego, wewnątrz kosza znajdują się regulowane w pionie siedziska załogi.
Wewnątrz wieży znajdują się stanowiska załogi, uzbrojenie, przyrządy obserwacyjne i celownicze, system kierowania ogniem, zespoły sterowania systemem uzbrojenia i wieżą, urządzenie systemu łączności i pulpit systemu samoobrony pojazdu. Na stropie umieszczono wieżyczkę dowódcy z otwieranym do tyłu włazem. Z tyłu na stropie zamontowano wsporniki do mocowania anten. Z przodu wieży po jej lewej stronie umieszczono głowicę celownika do strzelania na wprost i blok wyrzutni granatów dymnych, z prawej strony znajduje się drugi blok wyrzutni granatów dymnych. Wokół wieży są umieszczone głowice systemu ostrzegania o opromieniowaniu laserem.

Rosomak WEM
W wieżyczce dowódcy rozmieszczone są dwa peryskopy optyczne, wyposażone w filtr przeciwlaserowy oraz dzienno-nocny przyrząd obserwacyjny POD-72 Liswarta. W prototypie został zastosowany zestaw do obserwacji okrężnej Karil ODR-HV, a w pojazdach seryjnych mają być zamontowane zestawy obserwacyjne PCO SOD, posiadające cztery stałe moduły z blokami kamer dziennych i termowizyjnych, zamontowanych w górnej części rogów korpusu wieży. Możliwe jest także zainstalowanie systemu detekcji strzału z czujnikiem na stropie wieży.
Celowniczy dysponuje pulpitem sterowania systemem uzbrojenia z manipulatorem, za pomocą pulpitu steruje układami systemu kierowania ogniem uzbrojenia podstawowego oraz układem ruchu wieży i uzbrojenia. Celowniczy posiada także pulpit wielofunkcyjny PUL-04, który pełni funkcję kontroli wszystkich funkcji celownika moździerza kalibru 120 mm. Połączenie monitorów, pulpitu i konsol z układami wieży za pośrednictwem interfejsu RS-422. Dowódca dysponuje terminalem WB Electronics DD9620T z monitorem 10-calowym.

Uzbrojeniem wieży jest moździerz samoczynny kalibru 120 mm, działający na zasadzie długiego odrzutu lufy. Broń posiada monolityczną lufę o gładkim przewodzie i długości 3000 mm (L/25) z osłoną termiczną. Komora nabojowa jest zamykana zamkiem klinowym, o ruchu pionowym. W układzie oporopowrotnym zastosowano hydrauliczny opornik i hydrauliczny układ powrotny. Zasilanie moździerza odbywa się z mechanicznego podajnika magazynu amunicyjnego, a jego ładowanie następuje w każdym położeniu lufy moździerza w elewacji. Jednostka ognia przewożona w wieży wynosi 20 naboi, w poziomym, zmechanizowanym magazynie amunicyjnym z lewej strony tylnej części przedziału roboczego nośnika. Uzbrojeniem pomocniczym może być karabin maszynowy UKM-2000C, kalibru 7,62 x 51 mm z zapasem 250 naboi.
Moździerz umieszczony jest na ruchomym łożu, które umożliwia prowadzenie ognia w zakresie kątów elewacji od -5 do +80 stopni. Łoże umieszczone jest w kołysce, a z przodu posiada ruchomą osłonę. Układ obrotu wierzy w azymucie, w zakresie 360 stopni i uzbrojenia w elewacji składa się z zespołu sterowania układami regulacji nadążnej i silników elektrycznych z przekładniami redukcyjnymi, uzupełnionych pokrętłami ręcznymi.
Do strzelania może być stosowana używana w SZ RP amunicja moździerzowa kalibru 120 mm, dostosowana do użytkowania przez MAHSW oraz całkowicie nowe typy nabojów z pociskiem odłamkowo-burzącym, posiadającym zapalnik uderzeniowy, z pociskiem dymnym z zapalnikiem czasowym, z pociskiem oświetlającym z zapalnikiem czasowym oraz z pociskiem kierowanym półaktywnie laserowo.

Rosomak bazowy
Prowadzenie ognia umożliwia system celowniczy wyposażony w dzienno-nocny system obserwacyjno-celowniczy CM120, połączony elektronicznie z głównym uzbrojeniem oraz system kierowania ogniem. Zasadniczym elementem tego systemu jest głowica ZIG-T-2 przeznaczona do strzelania na wprost. ZIG-T-2 składa się z kamery termowizyjnej i dalmierza laserowego oraz układu automatycznego naprowadzania działa na cel. Kamera termowizyjna posiada niechłodzoną matrycę 640 x 480 pracującą paśmie 8-12 µm z cyfrowym przetwarzaniem obrazu oraz obiektyw o kącie pola widzenia 10-16 stopni w płaszczyźnie horyzontalnej z dwukrotnym powiększeniem. Kamera telewizyjna ma matrycę CCD o rozdzielczości 1440 x 1080 z obiektywem o skokowym kącie pola widzenia 2, 4, 12 i 23 stopni w płaszczyźnie horyzontalnej. Dalmierz laserowy jest bezpiecznym dla oczu urządzeniem klasy 1, pracującym w paśmie 1,54 µm, o zasięgu pomiaru od 50 do 10 000 m, z dokładnością do ±5 m i niskiej lub średniej powtarzalności impulsu. W systemie celowniczym MAHSW zastosowano komputerowy przelicznik balistyczny.
Wyposażenie z zakresu dowodzenia, łączności oraz nawigacji umieszczone w wieży obejmuje zestaw urządzeń zautomatyzowanego systemu dowodzenia i kierowania ogniem, radiostację, układ komunikacji wewnętrznej oraz moduł nawigacji inercyjnej z odbiornikiem satelitarnych danych nawigacyjnych. W skład Zautomatyzowanego Systemu Dowodzenia i Kierowania Ogniem WB Electronics wchodzi terminal pokładowy dowódcy DD9620T, moduł komputerowy MK-196A, układ zasilania oraz oprogramowanie operacyjne. Łączność i transmisję danych zapewnia radiostacja Radmor RRC-9311AP zakresu UKF z indywidualnym modułem utajniającym. Łączność wewnętrzną załogi zapewnia pokładowy cyfrowy zestaw urządzeń łączności wewnętrznej WB Electronics Fonet, z modułem centralnym Komut-10TA, pulpitami łączności wewnętrznej CZS-2FFS i CZS-2CS z zestawami nagłownymi, terminala sygnalizacji komend LIOD-F i głośnika wewnętrznego CZS-2G. Orientowanie się w terenie i nawigacja są możliwe przy pomocy niezależnego układu nawigacyjnego Honeywell TALIN 5000 z czujnikiem ruchu pojazdu, blokiem nawigacji satelitarnej Hertz HGPST-T z modułem SAASM. Wieża jest wyposażona w system samoobrony SSP-1KTO Obra-3KTO z pięcioma głowicami detekcyjnymi rozmieszczonymi wokół korpusu wieży oraz dwoma czterolufowymi wyrzutniami WGD-1D (902D) dla granatów dyspersyjnych kalibru 81 mm.

Eksploatacja i użycie bojowego
W czasie wdrażania do pododdziałów Wojsk Lądowych, Rosomak nie był traktowany przez gestora jako docelowy następca gąsienicowego BWP-1, niemniej jednak w 17. Wielkopolskiej Brygadzie Zmechanizowanej i w 12. Brygadzie Zmechanizowanej bataliony zmechanizowane były powoli przezbrajane w kołowe wozy bojoweRosomak. Na początku XXI wieku nie traktowano jednak jako klasycznego w tym znaczeniu wozu o charakterze BWP. Nie miał być on platformą dla ciężkich (wedle kwalifikacji NATO) pododdziałów zmechanizowanych, a dla jednostek tzw. „średnich”. Związki taktyczne, wyposażone w kołowe Rosomaki miały bowiem nie posiadać czołgów, ani ciężkich związków artyleryjskich, opierając cały swój park maszynowych na platformie kołowej. Część ówczesnych wojskowych podnosiła wówczas mocno wydumane zarzuty o słabym opancerzeniu Rosomaka (mimo oczywiście jeszcze słabszej obrony pancernej w BWP-1), o wysokiej sylwetce, teoretycznie znacznie gorszej manewrowości w terenie od pojazdów gąsienicowych, czy niedostatecznym uzbrojeniu wozów Rosomak w systemy przeciwpancerne. Kołowego Rosomaka uważano za wóz przeznaczony do misji ekspedycyjnych, o charakterze asymetrycznym, a nie na tzw. „pełnoskalową wojnę”. Planowano wówczas, że większość polskich brygad ogólnowojskowych (zmechanizowanych) zostanie w „nieokreślonej) przyszłości przezbrojone w nowoczesny gąsienicowy BWP, a w fazie przejściowej dla tych jednostek będzie zmodernizoana część (400 – 600) używanych wozów BWP-1, do standardu określonego jako Puma-1. Przetoczone powyżej zarzuty w dużej mierze nie miały żadnych podstaw merytorycznych, świadczyły także o braku zrozumienia dla tzw. „sił średnich” – w nowej doktrynie operacyjnej NATO, tak samo przydatnych dla planowania operacyjnego, jak i podstawowe ciężkie jednostki pancerne i zmechanizowane, które obecnie spełniają rolę podobną do dawnych, ciężkich jednostek kawaleryjskich. Nie znajdowały również uzasadnienia zarzuty kierowane wobec polskiego MON i dowództwa SZ RP o próbie całkowitego przezbrojenia wojsk zmechanizowanych w Rosomaki. Jednak problemem jest fakt, że z prawie 700 zamówionych bazowych wersji Rosomak, tylko połowa miała się stać następnie wersją bojową, a reszta miała zostać wykonana jako wsparcie dla wersji BWP, wszelkiej maści specjalistyczne, nieodzowne w nowoczesnych pododdziałach piechoty zmotoryzowanej.
Wdrażanie do linii

Pierwsze dziewięć Rosomaków, trzy KTO-bojowe i sześć transporterów bazowych, zgodnie z zapisami kontraktu z kwietnia 2003 roku, zostało formalnie odebrane przez wojsko w grudniu 2004 roku, ale faktycznie ich uroczyste przekazanie odbyło się w styczniu roku następnego. Pojazdy te wkrótce zostały skierowane do 17. Wielkopolskiej Brygady Zmechanizowanej, wchodzącej w skład 11. Dywizji Kawalerii Pancernej, która jako pierwsza miała zostać wyposażona w nowe kołowe wozy Rosomak. Zgodnie z planami z 2004 roku do przezbrojenia w nowe wozy bojowe wytypowano łącznie osiem batalionów zmechanizowanych: po trzy w 17. Wielkopolskiej Brygady Zmechanizowanych i kolejne trzy bataliony w 12. Brygadzie Zmechanizowanej oraz ostatecznie dwa bataliony z 21. Brygady Strzelców Podhalańskich. Łącznie w latach 2005-2010 miało być odebrane łącznie 446 wozów Rosomak. Wyposażenie w wozy Rosomak wyznaczone pododdziały, trafiło na liczne problemy. Jedyną realną wartość miały tylko bojowe wozy piechoty Rosomak, które zostały wyposażone w wieżę Hitfist-30P, ale ich produkcja znacząco się opóźniała. Wozy bazowe początkowo służyły do szkolenia kierowców oraz szkolenia logistyczne dla nowej struktury przyszłych jednostek, większość z nich została więc zmagazynowana. Poza tym wdrażanie do służby Rosomaków trafiło też na okres dużych zmian strukturalnych i organizacyjnych w Wojskach Lądowych, zapoczątkowanych wraz z 2002 rokiem. Bataliony piechoty zmechanizowanej na wozach kołowych przemianowano na zmotoryzowane, zmieniono także ich etaty. O ile do tej pory bataliony miały po trzy kompanie, po trzy plutony, a każdy pluton po cztery wozy (plus wóz dowódcy), co dawało łącznie 39 sztuk wozów BWP-1 w batalionie (plus wóz dowódcy batalionu), o tyle w nowej strukturze dodano czwartą kompanię, a batalion łącznie liczył 52 wozy (plus wóz dowódcy batalionu). Oznaczało to większe wymagania sprzętowe dla poszczególnych pododdziałów, a proces dostosowania do nowych struktur opóźniał przezbrajanie kolejnych pododdziałów.
W pierwszej połowie 2005 roku siłom zbrojnym przekazano 31 kolejnych podwozi bazowych i ani jednego wozu z wieżą Hitfist-30P. Dopiero pojazd z numerem 41 miał wieżę, był to również Rosomak z modyfikacjami zalecanymi w raporcie testów z kresu wrzesień-listopad 2004 roku. W sierpniu pojazd przeszedł uzupełniające próby kwalifikacyjne. Łącznie do końca 2005 roku armia otrzymała kolejnych 75 Rosomaków: 26 bojowych i 49 wozów bazowych. Kolejnych siedem, wyposażonych w wieżę, zostało przekazanych dopiero w marcu 2006 roku, pochodziły one jednak z puli zamawianej na rok poprzedni.








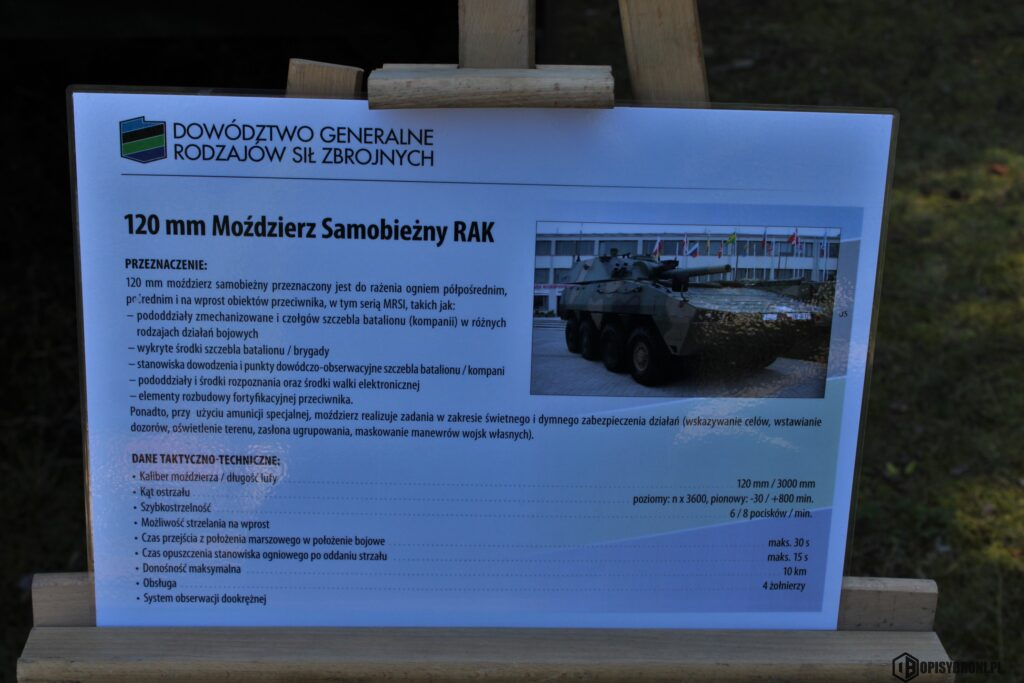



































Autor – zdjęcia: Dawid Kalka
Olsztyn (województwo Śląskie), Święto Wojska Polskiego 15.08.2023
W 2006 roku w Wojskach Lądowych rozpoczęto przygotowania do pierwszej zagranicznej misji wojskowej, w której miały być wykorzystywane Rosomaki. Cztery niezmodyfikowane wozy KTO-bojowe miały zostać wysłane do Libanu, ostatecznie jednak tego planu nie zrealizowano. Do końca sierpnia 2006 roku wojsko odebrało łącznie 100 Rosomaków, w tym 43 z wieżą Hitfist-30P. W następnym miesiącu w 17. Wielkopolskiej Brygadzie Zmechanizowanej rozpoczęto przygotowywać do misji SZ RP w Afganistanie. W całym roku 2006 zakłady z Siemianowic Śląskich dostarczyły łącznie 46 Rosomaków, a w tym jedynie 14 w wersji BWP. Opóźnienie było związane z dość poważnymi problemami z uruchomieniem w Polsce montażu wież, początkowo z włoskich części. Pierwszą wieżę Hitfist-30P ukończono w ZM Bumar-Łabędy. Łącznie w latach 2004-2006, Wojska Lądowe odebrały formalnie 43 Rosomaki w wersji bojowej. Było to znacząco za mało, nawet jak dla jednego batalionu, a już w styczniu 2007 roku planowano znaczącą rozbudowę polskich sił w PKW Afganistan.
Do połowy 2007 roku w miejsce niewielkiego dotychczas oddziału, do Afganistanu zostały skierowane dość znaczące siły. Ich trzonem był wówczas batalion manewrowy w sile trzech kompanii, w dwóch z nich od kwietnia znalazły się m.in.: 24 zmodernizowane i dostosowane do lokalnych warunków Rosomaki-M1. W 2007 roku zanotowano liczne ataki na te pojazdy, ze strony afgańskich Talibów, ale jedynie w czterech z nich nastąpiły poważniejsze uszkodzenia, a żaden żołnierz przebywający w Rosomaku nie zginął. Spośród czterech znacząco uszkodzonych Rosomaków, jeden został uszkodzony w bazie w wyniku ostrzału rakietowego, pozostałe na patrolach: dwa wskutek wybuchu improwizowanych ładunków wybuchowych IED i jeden po ciężkim ostrzale pociskami z wielkokalibrowego karabinu maszynowego. Dwa pojazdy, które były rażone przez IED wycofano następnie do kraju.

Wysyłanie znacznej ilości BWP oznaczało znaczące uszczuplenie zasobów krajowych, gdy tymczasem w latach 2004-2007 nie udało się zagospodarować pojazdów w wersji bazowej, których ewidencyjna ilość wynosiła pod koniec 2007 roku już ponad 100 sztuk. Plany na rok 2007 mówiły, że zostanie wykonane blisko 60 kolejnych wież, dla bojowych wersji Rosomak. Większym problemem było zagospodarowanie podwozi bazowych, gdyż z uwagi na anulowanie wdrożenia wersji transportera opancerzonego Rosomak-1 oraz Rosomak-2 oraz kilku wersji specjalistycznych, nie wykonano planu ich zagospodarowania. Jedynie kilkanaście takich pojazdów było wykorzystywanych do aktywnego szkolenia kierowców, rozpoczęto jednak przebudowę pierwszych wozów na nieuzbrojone transportery opancerzone dla obsług przeciwpancernych pocisków kierowanych Spike-LR i wozy ewakuacji medycznej Rosomak-WEM. Z kolei zamiast planowanych 58 pojazdów z wieżą Hitfist-30P, wojsko przyjęło formalnie tylko 33 sztuki tych maszyn. Wystąpiły bowiem pewne problemy z dostawami podzespołów do produkcji wież, co znów znacząco opóźniło kolejne dostawy.
Afgańska „Gwiazda”
W 2008 roku dostawy wież do Rosomaków również przebiegały z problemami i pewnymi opóźnieniami, ale tempo produkcji systematycznie rosło. Właśnie wówczas podjęto też bardzo istotną decyzję. Oto bowiem nakazano wstrzymanie dalszych zakupów wozów bazowych i w tym oraz następnym roku zamawiano jedynie Rosomaki w wersji BWP. Dzięki temu, o ile w końcu 2006 roku na stanie SZ RP znajdowały się 43 KTO-bojowe, o tyle w latach 2007-2009 na uzbrojenie trafiło kolejne 156 sztuk bojowych wozów piechoty. Niemniej jednak w latach 2008-2009 nastąpiło równocześnie dalsze zwiększenie zaangażowania Wojska Polskiego poza granicami kraju, co wiązało się z koniecznością przekierowania dużej części nowego sprzętu do PKW Afganistan, a nie do jednostek znajdujących się w kraju.

Wzmacniano PKW Afganistan oraz wystawiono kontyngent wojskowy w Republice Czadu i Republice Środkowoafrykańskiej (PKW EUFOR), do którego skierowano także najnowsze pojazdy bojowe Wojsk Lądowych. Ostatecznie do Czadu trafiło łącznie 16 Rosomaków; osiem BWP, w tym trzy jako wozy dowodzenia plutonu, sześć logistycznych Rosomaków-M2 oraz dwa wozy ewakuacji medycznej.
Z kolei w Afganistanie w 2008 roku nie tylko wzrosła liczebność kontyngentu, ale także nastąpiła jego reorganizacja. Siły polskie przejęły odpowiedzialność za prowincję Ghazni, koncentrując tam swoje siły główne. Powstały wówczas Polskie Siły Zadaniowe (Polish Task Force White Eagle). W tymże roku do Afganistanu wysłano łącznie 47 nowych Rosomaków. Pojazdy zostały szybko docenione i zyskały zaufanie jeżdżących nimi żołnierzami, mimo że liczba zamachów i starć zbrojnych wzrosła. Pojazdy pełniące służbę w Afganistanie nosiły początkowo jednolite ciemnozielone malowanie, przez które zyskały wkrótce nieoficjalny przydomek „zielone diabły”, ponoć nadane przez samych Talibów. W 2008 roku poważnie uszkodzenia odniosło osiem wozów, w tym dwa w wyniku porażenia granatami RPG-7 i sześć w wyniku porażenia IED. W obu ostatnich przypadkach uszkodzenia były na tyle poważne, że Rosomaki odesłano do Polski (łącznie w tym roku do kraju powróciło pięć wozów). W Afganistanie pojawiły się też dwie nowe wersje, przygotowane w ramach zadań doraźnego wzmocnienia kontyngentu. Pierwsza z nich to odmiana medyczna Rosomak-WEM PM-1 – pierwsze cztery wozy zostały skierowane na misję już w kwietniu 2008 roku. Drugą odmianą, także powstałą na podwoziu wozu bazowego, stał się transporter opancerzony Rosomak M-3.
W 2009 roku misja w Afganistanie zdominowała wysiłek sił zbrojnych, a także pod względem liczby zaangażowanego sprzętu. W tym roku PKW otrzymał kolejne 30 pojazdów, w tym pierwsze wozy Rosomak-WEM PM-2, a docelowej konstrukcji przedziału medycznego. We wrześniu tego roku doszło do pierwszego wypadku śmierci żołnierza w Rosomaku na polu walki. W czasie ataku na konwój logistyczny pod bojowym Rosomakiem eksplodował improwizowany ładunek wybuchowy. W wyniku ataku poległ plutonowy Marcin Poręba, a pięciu innych żołnierzy zostało poważnie rannych. Talibowie, którzy wcześniej przeprowadzali dość bez owocne próby ataku, teraz rozpoczęli podkładanie coraz to większych ładunków IED i miny pułapki. Tym czasem we wrześniu 2009 roku liczba Rosomaków w Afganistanie zwiększyła się w stosunku do marca z 59, do 76 wozów, ale do tego czasu uszkodzeń bojowych doznało 11 pojazdów. Łącznie w ciągu tego roku odnotowano łącznie 38 przypadków poważniejszych uszkodzeń pojazdów tego typu, z czego 28 razy uszkodzenia zostały spowodowane przez IED, pięć – ostrzał z granatników RPG-7 i pięć – ostrzał z broni strzeleckiej. Większość pojazdów udało się usprawnić na miejscu, ale 16 Rosomaków-M1 (dwa uszkodzone przez RPG-7 i 14 uszkodzonych przez IED), wymagało napraw fabrycznych. Zostały one następnie ewakuowane do kraju, podobnie jak jeden, który wyczerpał przebieg gwarancyjny. Dla uzupełnienia strat dostarczono do Afganistanu 32 kolejne wozy, do PKW trafiła też nowa wersja odmiany odmiany WEM (PM-2). Łącznie wojsko w 2009 roku odebrano 52 Rosomaki, wszystkie w wersji KTO-bojowe.
W marcu 2010 roku PKW Afganistan dysponował już 89 Rosomakami wszystkich typów. Realna liczba zaangażowanych wozów była jednak większa, ponieważ uszkodzone wozy lub wymagających dłuższych napraw, regularnie wysyłano do kraju. Etat został zwiększony do 150 pojazdów, planując od lipca do końca 2010 roku, skierować w rejon misji 61 nowych pojazdów – 51 w wersji bojowego wozu piechoty M-1 w odmianach podstawowej i dowódczej oraz 10 w wersji WEM (PM-2). Stanu tego nie osiągnięto, podjęto bowiem decyzję o stopniowym zmniejszaniu polskiego zaangażowania w Afganistanie. Mimo to, w sierpniu w Azji znajdowało się aż 114 Rosomaków, w tym 63 w wersji bojowego wozu piechoty, 32 wozy w wersji transportera oraz 19 WEM. W 2010 roku w wyniku rażenia Rosomaków ładunkami IED poległo kolejnych dwóch polskich żołnierzy, a kilkunastu zostało rannych. Ilość pojazdów wysłanych do Azji była tak duża, że mimo iż w 2010 roku odebrano 62 nowe wozy, w tym 57 bojowych, w tym kraju udało się przezbroić w nie ekwiwalent tylko dwóch batalionów, po jednym w 17. Wielkopolskiej Brygadzie Zmechanizowanej oraz 12. Brygadzie Zmechanizowanej. Pozostałe bataliony piechoty obu tych brygad nadal miały na stanie stare BWP-1.

Ostatecznie maksymalne jednorazowe nasycenie sprzętem w ramach PKW Afganistan, w całym okresie jego funkcjonowania (2007-2014), osiągnięto stan 134 Rosomaków znajdujących się na obszarze działań bojowych. Licząc natomiast z wozami rotowanymi, łącznie wysłano do Azji 181 pojazdów tego typu (30% całej produkcji). Ostatecznie straty bezpowrotne w PKW Afganistan w latach 2007-2014 to osiem Rosomaków M-1M oraz sześć Rosomaków M-3, czyli łącznie 14 wozów. Kilkadziesiąt innych, pomimo nawet dość poważnych uszkodzeń udało się przywrócić do służby. Działania w Afganistanie pozwoliły polskim żołnierzom przywieść duży bagaż doświadczeń eksploatacyjnych i wystawić pojazdom bardzo dobrą ocenę. Afgańskie doświadczenia wykazały, że Rosomak był pojazdem silnie uzbrojonym, wysoce mobilnym w trudnym terenie oraz względnie łatwym wozem w obsłudze oraz serwisowaniu w warunkach polowych.
Dalsze dostawy
Szczytowy okres zaangażowania w Afganistanie to jednocześnie czas, w którym wojsko odbierało największe ilości Rosomaków. W 2011 roku odebrano 51 bojowych i 13 bazowych Rosomaków, a w 2012 roku aż 88 pojazdów, z czego połowę w odmianie BWP, zaś w ostatnim roku funkcjonowania starej umowy, czyli w 2013 roku, wojsko odebrało łącznie 56 Rosomaków, z czego już tylko osiem w wersji bojowej. Wynikało to z wykonania całej zakontraktowanej puli na wieże Hitfist-30P, których łącznie powstało 359. Wraz z odbiorem ostatnich takich wież w 2013 roku fabrycznie zakończyła się, przynajmniej tylko na razie – wdrażanie do służby Rosomaka w wersji BWP. Do czasu pomyślnego wdrożenia do służby w Wojskach Lądowych Rosomaka z wieżą ZSSW-30, nie będą dostarczane nowe kołowe bojowe wozy piechoty.

Omawiając inne wersje Rosomaka, to w latach 2004-2013 do uzbrojenia zasadniczo weszła tylko jednak, docelowa i wyprodukowana w większej ilości odmiana specjalistyczna Rosomaka – wóz ewakuacji medycznej. Wówczas nie zdołano wdrożyć do użytku wozów pomocy technicznej, wersji rozpoznawczej, dowodzenia i moździerza samobieżnego. Dodatkowo w powodu misji trwającej w Afganistanie i wysłania w rejon Azji większej ilości wozów KTO, na terenie Polski nie zdołano przezbroić w całości ani jednej brygady zmechanizowanej w sprzęt kołowy. Dopiero po 2015 roku, dzięki zakończonej obecności na terytorium Afganistanu, proces ostatecznego przezbrajania dwóch pierwszych brygad nabrał znacznie większego tempa.
Ostatecznie Wojska Lądowe mają dysponować ośmioma batalionami piechoty zmotoryzowanej, która ma być wyposażona w Rosomaki. Według planów z 2015 roku trzy bataliony wozów z wieżami Hitfist-30P miała mieć 17. Wielkopolska Brygada Zmechanizowana i z końcem następnego roku miało zakończyć się ostateczne przezbrajanie wszystkich trzech batalionów piechoty zmotoryzowanej tej brygady w bojowe wozy piechoty Rosomak (proces przezbrajania tej brygady w KTO Rosomak zajął więc ponad dekadę). Brygada ta użytkuje także m.in.: Rosomaki WEM czy wozy służące do przewozu zestawów przeciwpancernych pocisków kierowanych Spike-Lroku. Poza tym w 2016 roku brygada ta otrzymała pierwsze wozy rozpoznania technicznego Rosomak-WRT, a w latach 2017/2018 otrzymała pierwsze wersje samobieżnego moździerza SMK-120 Rak (łącznie to ma być 24 sztuki) oraz wozy dowodzenia Rosomak-AWD (łącznie 12 sztuk).

W pełni wyposażona brygada zmechanizowana na Rosomakach, w sile trzech batalionów piechoty zmotoryzowanej, dywizjonu artylerii samobieżnej, dywizjonu przeciwlotniczego, batalionu saperów, batalionu dowodzenia, batalionu logistycznego oraz pozostałych pododdziałów, powinna posiadać łącznie prawie 300 Rosomaków wszystkich typów. Najnowsza struktura etatowa przewiduje dla batalionu zmotoryzowanego łącznie 88 wozów Rosomak wszystkich typów/ Dla kompanii dowodzenia batalionu mają znaleźć się pojazdy dowodzenia Rosomak-WD oraz wozy rozpoznawcze Rosomak-R1/R2 i Rosomak-RSK. W czterech kompaniach piechoty zmotoryzowanej ma znajdować się po 58 wozów w odmianie BWP – 14 w każdej kompanii (trzy plutony po cztery wozy) oraz dwa wozy w dowództwie batalionu. Każda kompania ma mieć takżę 1 Rosomak-WRT. Kompania wsparcia batalionu ma posiadać łącznie osiem samobieżnych moździerzy Rak (dwa plutony po cztery działony), trzy Rosomaki-S oraz cztery wozy dowodzenia Rosomak-WD. Pododdziały logistyczne batalionu powinny zawierać: wozami pomocy technicznej Rosomak-WPT i pojazdami ewakuacji medycznej Rosomak-WEM. Batalion dowodzenia brygady powinien dysponować Rosomakami-WD oraz Rosomakimi-R1/R2, a w składzie dywizjonu przeciwlotniczego powinny znaleźć się jeden Rosomak-WD OPL Łowcza i trzy Rosomaki-WD OPL Rega. W pododdziałach logistycznych brygady mają się znaleźć Rosomaki-WPT i Rosomaki-WEM.
Podsumowując dotychczasową historię programu KTO, należy podkreślić, że wybór wozu AMV był bardzo korzystny i przyniósł bardzo dużo pozytywnych „trendów” tak przemysłowi zbrojeniowemu – dzięki udanej implementacji licencji w WZM w Siemianowicach Śląskich (dziś Rosomak Spółka Akcyjna Siemianowice Śląskie) oraz u kooperantów – jak również wojsku. Stopniowa polonizacja pozwoliła na stopniowy rozwój szeregu firm związanych z jego produkcją, a następnie modernizacją. Rosomak okazał się także idealnym wozem do użycia w operacjach stabilizacyjnych poza granicami kraju (Afganistan. Czad). Niestety dość duża intensywność tych operacji oraz indolencja decyzyjna MON (wynikająca częściowo z złych przepisów, częściowo z braku kompetencji odpowiednich osób), jak również duże błędy, jakie powstały podczas planowania dla wdrożenia Rosomaka do Wojska Polskiego, jest bardzo niejednoznaczna. Fakt, że przezbrojenie tylko jednej brygady zmechanizowanej w KTO Rosomak zajęło lekko ponad 10 lat, jest wręcz niezrozumiały. Pełne przezbrojenie drugiej także idzie nadal bardzo powoli, mimo że od prawie 5 lat nie są już produkowane KTO-bojowe – jego przecież podstawowego wariantu. Program Rosomak jest jednym z najdłuższych i najdroższych programów jaki objął Wojska Lądowe WP od 1989 roku.

W polskiej służbie przyjęto liczebność drużyny piechoty zmotoryzowanej przewożonej na Rosomakach na ośmiu lub dziewięciu żołnierzy, z tego załoga liczy trzech żołnierzy, którzy się nie spieszają (kierowca, działonowy, dowódca załogi). Pociągnęło to za sobą zmniejszenie przewożonej sekcji ogniowej drużyny do pięciu lub sześciu żołnierzy (krytykowane w prasie fachowej). W efekcie, w transporterach użytkowanych w Afganistanie wymontowywano dwa siedzenia dla desantu dla zwiększenia miejsca na wyposażenie. Pluton zmotoryzowany składa się z czterech wozów, z których trzy przewożą po drużynie zmotoryzowanej, a czwarty sekcję wsparcia. Sekcja ogniowa drużyny zmotoryzowanej składa się z sześciu (lub pięciu) żołnierzy, w tym dowódcy drużyny, celowniczego karabinu maszynowego (UKM-2000P), celowniczego granatnika przeciwpancernego (RPG-7W) i strzelców. Oprócz broni zespołowych, sekcja ogniowa posiada karabinki (Beryl), z tego jeden z granatnikiem Pallad; karabinek ma także dowódca załogi. Oprócz nich, w transporterach zajmują miejsca dowódca plutonu i jego radiotelefonista (obaj z karabinkami), względnie według innej struktury, czterech żołnierzy dowództwa plutonu. Sekcja wsparcia liczy również pięciu żołnierzy, uzbrojonych w moździerz 60 mm LM-60 i granatnik automatyczny 40 mm Mk 19, oprócz karabinków.
Wykorzystanie w Wojsku Polskim
Pierwsze transportery Rosomak zostały przekazane wojsku 8 stycznia 2005 roku – pierwszym użytkownikiem została 17. Brygada Zmechanizowana z Międzyrzecza. Wozy KTO Rosomak są obecnie wykorzystywane w 4 brygadach i 1 pułku Wojsk Lądowych:
-
17 Wielkopolskiej Brygadzie Zmechanizowanej
-
12 Szczecińskiej Brygadzie Zmechanizowanej
-
15 Giżyckiej Brygadzie Zmechanizowanej: (w 2018 roku przyjęto na wyposażenie brygady jedynie moździerze 120mm RAK, Wozy Ewakuacji Medycznej (WEM), oraz wozy dowodzenia KMO RAK – docelowo na stan jednostki maja zostać przyjęte również wersje z wieżą bezzałogową i armatą 30mm)
-
21 Brygadzie Strzelców Podhalańskich: (w 2018 roku przyjęto na wyposażenie brygady jedynie moździerze 120mm RAK, Wozy Ewakuacji Medycznej (WEM), oraz wozy dowodzenia KMO RAK – docelowo na stan jednostki maja zostać przyjęte również wersje z wieżą bezzałogową i armatą 30mm)
-
Pułku Wsparcia Dowodzenia Dowództwa Wielonarodowej Dywizji Północny Wschód: (Jedynie wozy dowodzenia i wsparcia teleinformatycznego)
Rosyjska inwazja na Ukrainę (2022-)
W kwietniu 2023 roku polski rząd zapowiedział, że przekaże rządowi Ukrainy 200 egzemplarzy KTO Rosomak. Doniesiono, że 21. Brygada Zmechanizowana armii ukraińskiej zaczęła otrzymywać pierwszą partię tych 25-tonowych, ośmiokołowych transporterów opancerzonych w lipcu 2023 roku. Według blogu Oryx co najmniej 3 takie wozy zostały zniszczone, a 1 została uszkodzona podczas trwającej ukraińskiej kontrofensywy.
Bibliografia
-
Tomasz Kwasek, Wozy Bojowe Świata – Rosomak Nr. 3/2017 – Marzec
-
Praca Zbiorowa, Najnowsze Uzbrojenie Wojska Polskiego – Siły Lądowe, Bellona, Warszawa 2018
-
Andrzej Kiński, KTO coraz bliżej, „Nowa Technika Wojskowa”, Nr. 6/2004, Magnum-X, Warszawa
-
Andrzej Kiński, Co dalej z Rosomakiem?, „Nowa Technika Wojskowa”, Nr. 9/2005, Magnum-X, Warszawa
-
Andrzej Kiński, Pierwszy Rosomak „made in Poland”, „Nowa Technika Wojskowa”, Nr. 1/2006, Magnum-X, Warszawa
-
Jarosław Wolski, Twardy pancerz. Afgańskie Rosomaki, „Nowa Technika Wojskowa”. Nr. 8/2021, Magnum X, Warszawa
-
https://en.wikipedia.org/wiki/KTO_Rosomak
-
https://gdziewojsko.wordpress.com/wozy-bojowe/kto-rosomak/
-
Ministerstwo Obrony Narodowej
-
https://pl.wikipedia.org/wiki/KTO_Rosomak
-
https://commons.wikimedia.org/wiki/Category:KTO_Rosomak
- https://tank-afv.com/modern/Poland/KTO-Rosomak.php