Transportery gąsienicowe MT-Lbu
Kompleks „Maszyna”
![]()
Historia konstrukcji
Dziś w świadomości wielu ludzi radziecki sprzęt pancerny obecnie nie wydaje się mieć istotnych tajemnic, do czego w szczególności miał się mocno przyczynić upadek Związku Radzieckiego, nieco ponad dziesięcioletni okres mocno rozluźnionej cenzury w „nowej” Rosji i wejście dawnych członków Układu Warszawskiego w struktury NATO wraz z ogromną ilością użytkowanego sprzętu wojskowego – pojazdów bojowych i wozów specjalistycznych. Jednak mocno nieznane pozostają dziś fakty projektowania i produkcji w niewielkiej ilości wozów specjalistycznych, które znalazły się też przecież na wyposażeniu Wojska Polskiego.
Jednym z mniej poznanych pojazdów, produkowanych przez lata i szeroko używanych były właśnie pojazdy MT-LBu, czyli – „wielozadaniowy ciągnik, lekko opancerzony, uniwersalny”, oznaczony jako Obiekt 10. Nawet wielu rosyjskich autorów nadal utożsamia go w prostej linii z ciągnikami gąsienicowymi MT-LB, podobnie jak liczni jego żołnierze-mechanicy i kierowcy. W rzeczywistości oba pojazdy posiadały ze sobą wiele wspólnych komponentów, jednak o ile ciągniki MT-LB były w pełni oryginalną konstrukcją, to jednak pojazdy MT-LBu posiadają wiele więcej wspólnego z nośnikiem działa samobieżnego 2S1 Goździk. Wprawdzie nośnik Goździka – MT-LBusz, zewnętrznie nie jest uderzająco podobny do MT-LBu, to właśnie jak najbardziej wywodzi się z tego pojazdu i dziedziczy po nim wiele rozwiązań konstrukcyjnych. MT-LBu trafił także na wyposażenie jednostek Wojska Polskiego, początkowo jako nośnik systemu dowodzenia i kierowania ogniem artylerii. Maszyna, a następnie większość pojazdy bazowe, większość elementów polowego systemu dowodzenia i kierowania PASUW, czyli wozu MP-21 – MP-25 oraz BETA-3M oraz nośnik stacji zakłóceń R-330P.
Historia powstania tych trzech pojazdów jest mocno ze sobą powiązana – wszystkie powstały w biurze konstrukcyjnym Charkowskiej Fabryki Traktorów im. Sergo Ordżonikidze, w zespole konstruktorów kierowanym przez A. F. Biełousowa. Pierwszy był MT-LB, czyli Obiekt 6, a faktycznie to jego pierwszy, nieopancerzony wariant MT-L, opracowywany od połowy lat 50.-tych XX wieku i produkowany od 1964 roku. Potem powstał pojazd MT-LBu, a w 1967 roku rozpoczęto prace nad działem samobieżnym 2S1. Pierwotnie, zastosowanym nośnikiem dla powstającego działa samobieżnego miał być MT-LB, choć jako alternatywę traktowano podwozie bojowego wozu piechoty BMP-1, ale trzeba było zastąpić go dłuższym i cechującym się większą nośnością podwoziem MT-LBu. Przekonstruowano je bardzo szybko – w 1969 roku rozpoczęły się próby prototypów działa samobieżnego, rok później przyjęto do uzbrojenia pod nazwą Gwozdika (Goździk). Produkcja seryjna dział samobieżnych 2S1 w Charkowie ruszyła w 1971 roku. Część artyleryjską – haubicę 2A31 wraz z napędami naprowadzania dostarczał Urałmasz. Bazowy MT-LBu został przyjęty do uzbrojenia w 1970 roku, a jego produkcję seryjną podjęto dwa lata później.
Ukłąd jezdny pojazdu był identyczny z 2S1 – siedem lekkich kół nośnych tłoczonych z blachy aluminiowej, napędowe koła z przodu i napinające z tyłu. Koła nośne są zawieszone na wałkach skrętnych, cztery skrajne pary otrzymały dodatkowo amortyzatory hydrauliczne. Gąsienice o szerokości 350 mm, w pierwszych seriach produkcyjnych posiadały sworznie metalowe, a następnych już metalowo-gumowe. Teoretycznie mogą być także zakładane prawie dwukrotnie szersze gąsienice śniegowe, opracowane pierwotnie dla MT-LB.

1W13 – Armii Narodowej Niemieckiej Republiki Demokratycznej
Widlasty, 8-cylindrowy silnik wysokoprężny z turbodoładowaniem JaMZ-238N o mocy 221 kW (300 KM) przy 2100 obr./min., umieszczono w centralnej części kadłuba w płaszczyźnie wzdłużnej pojazdu, a układ jego chłodzenia z lewej burty. Układ przeniesienia napędu składa się z dwutarczowego sprzęgła głównego przekładni pośredniej, przekładni głównej (umieszczonej z przodu kadłuba), dwóch jednostopniowych, planetarnych przekładni bocznych i hamulców. Mechaniczna skrzynia biegów posiadała pięć przełożeń do przodu i jeden bieg wsteczny oraz multiplikator podwajający praktycznie liczbę biegów. Zbiornik paliwa mieści 550 litrów oleju napędowego, dzięki czemu pojazd mógł przejechać po utwardzonych drogach do ok. 500 km. Maksymalna prędkość jazdy wynosiła 61,5 km/h, średnia prędkość ok. 30 km/h. Wóz mógł pokonywać rowy o szerokości do 2700 mm i ścianki pionowe o wysokości do 700 mm. Maksymalne pokonywanie pochyłości to 35 stopni w osi wzdłużnej i 25 stopni w osi poprzecznej. Po krótkim przygotowaniu (uszczelnienie smarem szczelin między elementami współpracującymi) pojazd może pływać, używając jako napędu gąsienic, których sprawność zwiększa się dzięki hydrodynamicznym nakładko, montowanym na kadłubie. Maksymalna prędkość w wodzie nie jest imponująca – nie przekracza 5 km/h. Okres międzynarodowy wynosi 6000 km lub 5 lat.
Kadłub jest wyraźnie wyższy niż w przypadku 2S1 – posiada wysokość 1620 mm, wobec 125 mm, wraz z układem jezdnym odpowiednio 2000 mm i 1640 mm). Jest on samonośną konstrukcją, spawaną z blach stalowych o maksymalnej grubości 15 mm. Jego przednia płyta jest nachylona pod małym kątem, około 52 stopni (w dziale samobieżnym 2S1 wynosiła ona 79 stopni), dzięki czemu przedział kierowania znajduje się prawie na samym przedzie pojazdu. Zaopatrzono go w dwa prostokątne okna, zamykane stalowymi pokrywami i dostępny przez dwa włazy w płycie stropowej lub wąski korytarzyk z prawej burty wozu. Właz kierowcy siedzącego z lewej strony, opiera się do tyłu dzięki czemu może on prowadzić wóz z wychyloną ponad strop wozu. Właz dowódcy natomiast opierał się z przodu, stanowiąc dla niego ochronę w czasie trwania jazdy. Kierowca dysponuje czterema peryskopami, a dowódca obrotowym przyrządem obserwacyjnym.
Za silnikiem, w stropie kadłuba, został wycięty otwór na pierścień otworowy wieży o średnicy 1700 mm. W tylnej części kadłuba znajduje się przestronny przedział, przeznaczony do instalacji różnorodnej aparatury. Wejście do niego, to niewielkie, jednoczęściowe drzwi w tylnym pancerzu, których otwarcie wywołuje rozłożenie się stopnia-schodka, ułatwiającego wejście. W razie potrzeby można skorzystać także z dużego, prostokątnego włazu ulokowanego na stropie przedziału.
Pojazd gąsienicowy MT-LBu był od samego początku jako nośnik dla różnorodnych systemów specjalistycznych: łączność , dowodzenie, kierowanie ogniem, radiolokacyjnych, rozpoznawczych czy walki elektronicznej. Dlatego wóz otrzymał w miarę pojemny kadłub – jego całkowita objętość wynosiła 13,4 m3, w którym bez trudu mieści się niezbędne wyposażenie. Różnorodność stosowanej na wozach MT-LBu aparatury specjalistycznej. Dlatego też faktycznie powstało tyle różnorodnych wersji, które bardzo często tworzono w niemal chałupniczych warunkach, nie ma oficjalnej listy, która przedstawiała by wszystkie powstałe wersje. Wiele z tych wozów mogło powstać w bardzo znikomej ilości. Najwięcej tych wozów powstała na terytorium Związku Radzieckiego, następnie Rosji czy Ukrainie. W czasach Układu Warszawskiego najpopularniejszą wersją stosowaną poza Związkiem Radzieckim, była wersja 1W12 Maszyna – który posiadał instalację jako system dowodzenia jednostkami artyleryjskiej.

1W15
Skonstruowanie Maszyny wiązało się ściśle z przyjęciem do uzbrojenia pierwszej powojennej generacji dział samobieżnych. Konstrukcja z lat wojny, to bez wyjątku działa bezpośredniego wsparcia i przeciwpancerne, które nie wymagały scentralizowanego dowodzenia, natomiast przyjęte do uzbrojenia na przełomie lat 60.-tych i 70.-tych XX wieku 2S1 Gwozdika i 2K3 Akacija, które były przeznaczone do strzelania ogniem pośrednim i wymagały precyzyjnych informacji o wyznaczonych celach – współrzędnych, niezbędnych do celnego strzelania. Ponieważ były to działa samobieżne i opancerzone, uznano, że takie same powinny być wozy dowodzenia dla nich był niemal oczywisty – przemawiała za tym unifikacja z działami 2S1, podczas gdy nośnik dla działa samobieżnego 2S3 – Obiekt 100, został uznany za zbyt ciężki, aby przeznaczyć go dla projektu wozu dowodzenia.
Prace nad komponentami systemu rozpoczęto pod koniec lat 60.-tych, próby poligonowe, które były realizowane były na początku kolejnej dekady, a produkcja została zainicjowana pod koniec pierwszej połowy lat 70.-tych XX wieku. Na takich samych nośnikach rozmieszczono także stanowiska dowodzenia szczebla pułku/brygady artylerii, ale nie wchodziły one bezpośrednio w skład systemu Maszyna. Równolegle konstruowano stanowiska dla dywizyjnych pułków i baterii przeciwlotniczych, a także ruchome punkty dowodzenia dla jednostek zmechanizowanych szczebli pułk-dywizja (system PASUW – Poliewaja Awtomatizirowannaja Sistiema Uprawlienija Wojsk). Wszystkie na nośnikach MT-LBu, za wyjątkiem wozów dowódczo-sztabowych MP-31, który powstał na bazie podwozia z bojowego wozu piechoty BMP-1. Założono przy tym nie tylko pełną unifikację ale i maksymalnie dużą część ich wyposażenia: środków łączności, przetwarzania danych, aparatury zasilania. Miał oto spowodować łatwiejszą wymianę informacji i prowadzenie koordynacji działań. Docelowo chciano stworzyć pełną sieć dowodzenia wojskami lądowymi i wspierające je swym działaniem lotnictwo. Analizy przeprowadzone w tym zakresie potwierdzały, że sprawne dowodzenie i dystrybucja precyzyjnej informacji zwiększa wydatnie skuteczność użytych środków bojowych. . Nawet wówczas gdy nie były dostępne systemy elektroniczne, a transmisja danych przebiegała stosunkowo powoli, uzyskiwano dzięki temu wzrost skuteczności o nawet 200%.
Na samym początku konstruktorzy systemu dowodzenia artylerią 1W12 Maszyna musieli zrezygnować z pierwotnego planu stworzenia uniwersalnego wozu dla dowódcy baterii dywizjonu, potem został dodany pojazd dla szefa sztabu dywizjonu, mieszczący przelicznik balistyczny i wóz oficera ogniowego baterii. Początkowe założenia przewidywały bardzo wysoki stopień automatyzacji realizowanych czynności: współrzędne wyznaczonego celu miały być przekazywane albo przez wyższe ogniwa łańcucha dowodzenia, albo określane przez wysunięty punkt obserwacyjny baterii lub dywizjonu. W tym drugim przypadku dowiązanie położenia celu do współrzędnych geograficznych miało się odbywać automatycznie. Dane do strzelania miała wypracować każda bateria osobno z uwzględnieniem poprawki na zajmowaną pozycję. Zadanie ogniowe – liczba i rodzaj pocisków czy czas prowadzenia ognia, miało być zadane, podobnie, jak moment otwarcia ognia. Okazało się jednak, że skonstruowana aparatura jest nadmiernie skomplikowana i zawodna oraz zajmuje zdyb dużo miejsca w samych pojazdach. Dlatego znacząco zwiększono udział operacji wykonywanych przez obsługi stanowisk, najczęściej z użyciem klasycznych metod obliczeniowo-wykreślnych oraz tablic balistycznych.
W skład systemu wchodziły wozy czterech typów: dowódcy baterii, oficera ogniowego baterii, dowódcy dywizjonu i szefa sztabu dywizji. Wozy dowódców wyposażono w taki sposób, aby pełniły funkcję wysuniętych stanowisk obserwacyjnych (dopiero na szczeblu brygady funkcjonowały specjalizowane pojazdy rozpoznawcze). Zewnętrznie wozy dowódcy baterii – 1W14. Także wozy oficera ogniowego baterii 1W13 i szefa sztabu dywizjonu 1W16, zewnętrznie były do siebie podobne. Zakładano, że sprzęt będzie kierowany do jednostek wyposażonych w samobieżne haubice 2S1 lub 2S3, samobieżne armaty 2S5 i 2S7 oraz samobieżne moździerze 2S4, będzie w praktyce identyczny.
Pojazd 1W13 pełni funkcję stanowiska dowodzenia baterii i zajmuje pozycję razem z nią. Zapewnia precyzyjne topodowiązanie pozycji i kontroluję orientację dział baterii. W tym celu została w wozie zainstalowana aparatura 1T121-1 z podstawą kursową Majak., a obok kierowcy został umieszczony sprzężony z nim kursograf KP-4. Aparatura 1T121-1 z blokiem czujników nachylenia azymutu i elewacji znajduje się w pobliżu środka ciężkości wozu, jest zasilana prądem o częstotliwości 400 Hz, pochodzącego z specjalnego przetwornika.. Podaje ona bieżące współrzędne pojazdu, określa współrzędne prostokątne punktu, automatycznie określa kąt kursowy, przekształca podane współrzędne biegunowe w prostokątne, a także umożliwia automatyczne określanie przebytej drogi. Z lewej burty przy klapie-oknie, został zainstalowany żyrokompas artyleryjski 1G-25. W niewielkiej wieży, posadowionej za przedziałem napędowym i mającej kształt ściętego stożka, został umieszczony panoramiczny wizjer PW-1, czyli 1OP61, który umożliwia pomiar kątów w płaszczyźnie poziomej oraz pionowej (ma pięciokrotne powiększenie i pole widzenia 9 stopni) oraz cztery ogrzewane peryskopy TNPO-170A. Na cokole przy wieży został zainstalowany 12,7 mm wielkokalibrowy karabin maszynowy DSzK 38/46, służący do samoobrony.























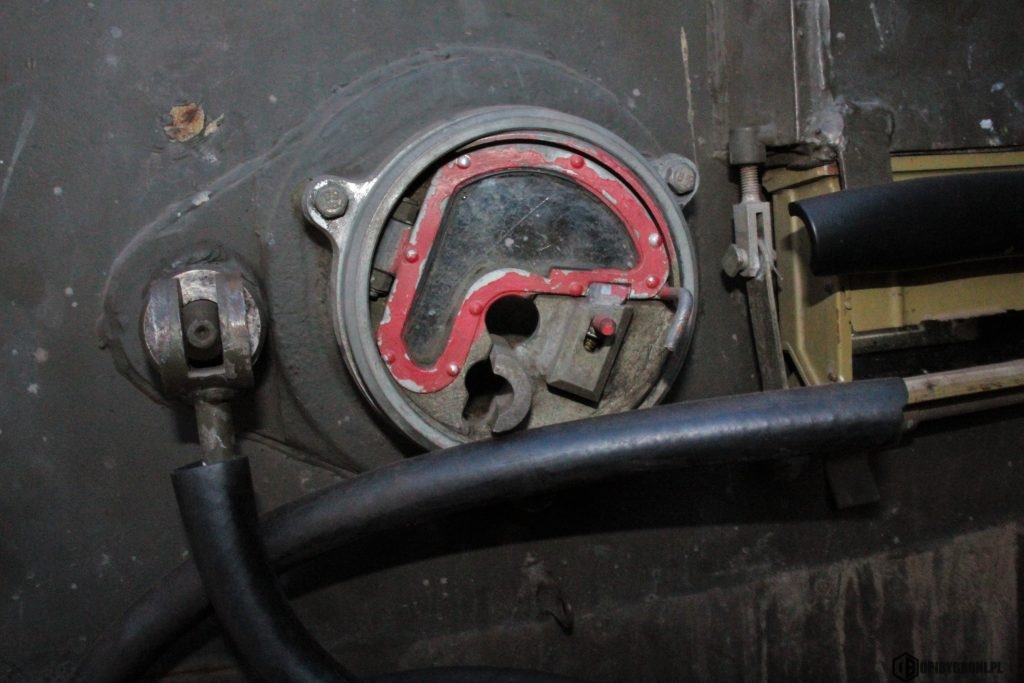








Pojazd 1W13
Autor – zdjęcia: Dawid Kalka
Zabrze, Park Techniki militarnej – Muzeum Techniki Wojskowej im. Jerzego Tadeusza Widuchowskiego
Pojazd otrzymuje dane do strzelania z SD dywizjonu w postaci zakodowanej (tryb automatyczny z użyciem przyrządu 9Sz34, czyli APK, który automatycznie przelicza kąty podane w stopniach na tysięczne) lub ustnej. Może też odbierać i przetwarzać informacje o celach i poprawkach do strzelania od wozu 1W14. Dla zapewnienia kontaktu z przełożonymi i podwładnymi zainstalowano aparaturę komunikacyjną środków łączności 1T803M, trzy radiostacje R-123M i telefon TA-57, które pozwalają na równoczesny kontakt z siedmioma odbiorcami: obsługami dział baterii, jej dowódcą i szefem sztabu dywizjonu. Łączność przewodową umożliwia 500-metrowy kabel typu P-275, na szpuli, umieszczonej na tylnym pancerzu. Zasilanie sprzętu łączności zapewniają dwie baterie akumulatorów 6SE-190SEL. Te z kolei ładuje się z użyciem generatoraGiW8/6000, napędzanego dwucylindrowym, czterosuwowym, wysokoprężnym silnikiem spalinowym D-21A1 o mocy 18,9 kW (25,7 KM). Silnik może pracować na postoju i w ruchu, gdyż nie przewidziano możliwości ładowania akumulatorów przez silnik główny, który podczas pracy ładuje tylko akumulator, zasilający rozrusznik i oświetlenie. W razie potrzeby załoga pojazdu 1W13 może samodzielnie wypracować dane do strzelania obsługując się przenośnym przyrządem PUO-9M, busolą PAB-2AM, dalmierzem DSP-30 i peryskopem. Załogę stanowiło pięciu żołnierzy: oficer ogniowy baterii, operator-topograf, radiotelegrafista, operator aparatury obliczeniowej (pomocnik radiotelefonista) i kierowca wozu.
Podstawowe dane techniczne: 1W13
-
Masa pojazdu – 15 500 kg
-
Długość wozu – 7210 mm
-
Wysokość wozu – 2510 mm
-
Szerokość wozu – 2850 mm
-
Prześwit pojazdu – 400 mm
-
Zapas przewożonego paliwa – 550 l
-
Prędkość maksymalna – 61 km/h
-
Zasięg maksymalny – do 500 km
Pojazd, oznaczony jako 1W14 służy dowódcy baterii i w szyku bojowym, gdzie zajmuje wysuniętą pozycję, gdzie pełni funkcję stanowiska rozpoznania i kontroli ognia. Jego wyposażenie jest znacznie bogatsze, niż w wozie 1W13. Oprócz wszystkich, wymienionych w poprzednim akapicie urządzeń, w obrotowej wieży zamontowano laserowy dalmierz artyleryjski DAK 2M1 lub 2M2 i kombinowany przyrząd obserwacyjny NNDW. DAK jest odmianą przenośnego dalmierza 1D11M2 i może być szybko wymontowany i używany na zewnątrz pojazdu. Potężny obiektyw nocnego kanału obserwacji przyrządu obserwacyjnego NNDW, został umieszczony w obudowie, w prawej stronie wieży. Dodatkowo może być używany panoramiczny przyrząd obserwacyjny WOP-7A. W przypadku autonomicznego wypracowania danych do strzelania, używa się przyrządu do transformacji współrzędnych 1T804K1, którego koordynator jest zamontowany w wieży, pomiędzy przyrządem NNDW i dalmierzem DAK, Na wieży zamiast montowanego wielkokalibrowego karabinu maszynowego, montowany był 7,62 mm karabin maszynowy PK. Do zestawu trzech radiostacji R-123, została dodana jedna radiostacja UKF typu R-107. Załoga wozu składa się z: dowódcy baterii, operatora-topografa, dwóch łącznościowców, operatora dalmierza i kierowcę wozu.
Podstawowe dane techniczne: 1W14
-
Masa pojazdu – 15 540 kg
-
Długość wozu – 7210 mm
-
Wysokość wozu – 2450 mm
-
Szerokość wozu – 2850 mm
-
Prześwit pojazdu – 400 mm
-
Zapas przewożonego paliwa – 550 l
-
Prędkość maksymalna – 61 km/h
-
Zasięg maksymalny – do 500 km
Pojazd, oznaczony jako 1W15 jest bardzo podobny pod względem wyposażenia i swoich funkcji 1W14, ale jako pojazd dowódcy dywizjonu posiada jeszcze bogatsze wyposażenie, w szczególności, jeżeli chodzi o środki łączności. Jedną z radiostacji typu R-123, zastąpiono radiostacją UKF R-111 z teleskopowym masztem antenowym, zamontowanym na tylnym pancerzu. Dodatkowa antena dipolowa przewożona jest w pojemniku z owalnymi drzwiczkami w tylnej ścianie kadłuba. Kolejnym nowym elementem wyposażenia jest radiostacja krótkofalowa typu R-130 z teleskopową anteną. Do dyspozycji załogi znajduje się urządzenie utajniające typu T-219 Jachta. Nieco inne jest także wynośne wyposażenie topograficzne: przyrząd kierowania ogniem artyleryjskim typu PUO-9U z dwoma planszetami, stereoskopowy dalmierz DS-1. Podobnie jak w poprzednim wozie, przy wieży montowany był 7,62 mm karabin maszynowy PK.











1W14 (1V14 – Armii Czechosłowackiej)
Autor – zdjęcia: Dawid Kalka
Vojenské Historické Múzeum, Piešťany, Słowacja
Podstawowe dane techniczne: 1W15
-
Masa pojazdu – 15 840 kg
-
Długość wozu – 7210 mm
-
Wysokość wozu – 2450 mm
-
Szerokość wozu – 2850 mm
-
Prześwit pojazdu – 400 mm
-
Zapas przewożonego paliwa – 550 l
-
Prędkość maksymalna – 61 km/h
-
Zasięg maksymalny – do 500 km
Ostatni, wóz szefa sztabu dywizjonu 1W16, bardzo przypomina pojazd 1W13 – zewnętrznie wyróżnia go jedynie brak głowicy przyrządu obserwacyjnego PW-1 pod odchylanym kołpakiem w przedniej części stropu nieobrotowej wieży. Zmiany konstrukcyjne we wnętrzu wozu są bardziej istotne. Przede wszystkim w wozie znalazł się komputer balistyczny 9W59. Nie posiada natomiast aparatury topodowiązania 1T121, kursografu KP-4 żyrokompasu, choć zachowano jego okno w lewej burcie. Zestaw sprzętu łączności jest prawie identyczny jak w wozie 1W15, a nie w 1W13, z tą jedyną różnicą, że radiostację UKF R-107 zastąpiono odbiornikiem R-326. Oznacza to, że wóz posiada teleskopowy maszt antenowy i dodatkową antenę dopilową. Według czechosłowackiej dokumentacji wozy typu 1W16, występujące w nieznacznie się różniących wersjach dla dywizjonów dział samobieżnych 2S1 (1W16-1), dla 2S3 (1W16-2), dla 2S4 (1W16-3), dla 2S5 (1W16-4) i dla 2S7 (1W16-5). Nie wiadomo jednak na czym dokładniej miały te różnice polegać, nie potwierdzają tego źródła rosyjskie, ale na ich korzyść przemawia oficjalna informacja, że wóz szef sztabu dywizjonu kompleksy 1W12M-3 Maszyna-M, który posiada oznaczenie 1W16-8.
Jakie dodatkowe źródło informacji o celach dla dywizjonu mogą funkcjonować radiolokatory taktyczne SNAR-10/20M, zbudowany na nośniku MT-LB oraz systemy radiolokacyjne, śledzące trajektorię pocisków artylerii przeciwnika urządzenie ARK-1M i Zoopark, ona także na nośnikach MT-LBu, które są przydzielane pułkom i brygadom artylerii.

Armia Bułgarii – 1W15
Podstawowe dane techniczne: 1W16
-
Masa pojazdu – 15 910 kg
-
Długość wozu – 7210 mm
-
Wysokość wozu – 2430 mm
-
Szerokość wozu – 2850 mm
-
Prześwit pojazdu – 400 mm
-
Zapas przewożonego paliwa – 550 l
-
Prędkość maksymalna – 61 km/h
-
Zasięg maksymalny – do 500 km
System został przyjęty do uzbrojenia w 1973 roku i równolegle prowadzono jego modernizację. Wersja oznaczona jako 1W12-1 była przede wszystkim przeznaczona na eksport, gdzie otrzymały ją państwa układu Warszawskiego oraz kraje zaprzyjaźnione, takie jak: Irak, Jemen, Etiopia oraz Kuba. Ponieważ, jak się szybko okazało zapotrzebowanie na nośniki gąsienicowe MT-LBu było bardzo duże, a ich skopień technicznej komplikacji niezbyt duży, zdecydowano się na przekazanie niezbędnej dokumentacji produkcyjnej i praw licencyjnych Bułgarii, w celu uruchomienia tam ich produkcji, równolegle z rozpoczęciem produkcji dział samobieżnych (haubic) 2S1 Goździk (kaliber 122 mm). Fabryka, gdzie miała się odbywać produkcja – Beta w Crvenym Briagu opanowała ich produkcję zaraz po rozpoczęciu montażu lżejszych MT-LB. Pojazdy produkowane tam trafiły na wyposażenie jednostek Związku Radzieckiego, ale także i innych państw. Z czasem prawie wszystkie eksportowe Maszyny wykorzystywały nośniki produkcji bułgarskiej. W połowie lat 80.-tych montowane dotychczas używane 12,7 mm wielkokalibrowe karabiny maszynowe DSzK, znajdujące się na wozach 1W13 oraz 1W16, zaczęto zastępować wielkokalibrowymi karabinami maszynowymi NSW tego samego kalibru. Dotyczyło to także pojazdów starszych wersji oraz produkowanym na eksport. W pozach późniejszych wersji, produkowanych po 1985 roku, w celu zwiększenia sprawności i gąsienic, jako podstawowego napędu podczas pływania (pokonywania przeszkód wodnych), zmieniono konstrukcje kierownic strug. Zamiast stosowania żebrowanych nakładek przednich, zastosowano nakładki, wykonane z karbowanej blachy stalowej, a sterownice umieszczono na stałe w sześciu ukośnic ustawionych, prostokątnych, otworach, ulokowanych w przedniej części kadłuba. Ich zastosowanie zwiększało prędkość pływania o 20%.
W zmodernizowanym systemie 1W12-3 Maszyna-M, została zastosowana cyfrowa aparatura obróbki i transmisji danych opartą na procesorach Bagier – komputery się znajdują się we wszystkich wozach systemu. Kolejna generacja radiostacji umożliwiała ograniczenie liczby samych urządzeń wewnątrz wozu. Kolejna generacja radiostacji umożliwiła ograniczenie przewożonych urządzeń typu UKF w wozach 1W14-3 i 1W15-3 do zaledwie trzech. Oba wspomniane typy wozów uzyskały możliwość naprowadzania na cele, odległe o nawet 7 km kierowanych laserowo pocisków artyleryjskich. Liczbę dział baterii , obsługiwanych przez wozy 1W13-3 i 1W-14-3 zwiększono z 6 do 8, a liczbę baterii artyleryjskich w jednym dywizjonie z 3 do 4. Różnice w osiągach systemu, w porównaniu z starszą wersją 1W12-1 dobrze ilustrują podane niżej dane:
1W12-1
-
Czas rozwinięcia dywizjonu z marszu i przygotowanie strzelania – 12 minut
-
Czas przygotowania otwarcia ognia do nowego celu – 6 minut
-
Błąd w określeniu nawigacji – 07-1%
-
Odległość dział samobieżnych na pozycjach bojowych między sobą – do 50 metrów
-
Automatyczne określenie i uwzględnienie danych meteo – nie
-
Automatyczne dowodzenie manewrem – nie
1W12-3
-
Czas rozwinięcia dywizjonu z marszu i przygotowanie strzelania – do 4,5 minut
-
Czas przygotowania otwarcia ognia do nowego celu – 1 minuta
-
Błąd w określeniu nawigacji – 0,6-0,9%
-
Odległość dział samobieżnych na pozycjach bojowych między sobą – do 500 metrów
-
Automatyczne określenie i uwzględnienie danych meteo – tak
-
Automatyczne dowodzenie manewrem – tak








1W16 (1V16 – Armii Czechosłowackiej)
Autor – zdjęcia: Dawid Kalka
Vojenské Historické Múzeum, Piešťany, Słowacja
Jako opcję przewidziano wciągnięcie w skład posiadanej aparatury modułów odbioru danych systemu nawigacji satelitarnej, gdyż obecna aparatura nawigacyjna nie jest zbyt dokładna. Maksimum swoich możliwości kompleks osiągnął wtedy, gdy wszystkie działa baterii artyleryjskiej są wyposażone w odbiorniki zautomatyzowanego systemu dowodzenia 1W514-1 lub nowocześniejszego Uspiech-S. Wóz 1W15-3 może być także wykorzystywany jako wysunięty punkt obserwacji i dowodzenia dowódcy pułku lub brygady artylerii. Wyposażenie poszczególnych pojazdów zunifikowano w znacznym stopniu z komponentami systemu 1W17 Kapustnik B, opracowanego dla baterii i dywizjonów artylerii holowanej i rozmieszczonego na nośnikach kołowych. Przewidziano także możliwość przeprowadzenia modernizacji do tego standardu wozów starszych wersji oraz możliwość wykorzystania bezzałogowych, wysuniętych stanowisk obserwacyjnych i kierowania ogniem. Nie jest przy tym jasne, czy ową funkcję miały stanowić ustawione na pozycjach wozy 1W14-3, czy specjalnie skonstruowane do tego celu miniaturowe urządzenia bazujące, takie jak np. na przenośnym kompleksie 1W160 Riga.
Pod koniec lat 80.-tych XX wieku do jednostek zaczęły trafiać pojazdy kompleksu 2W12M Falset, które zewnętrznie óżnił się przymocowanym do tylnego pancerza z prawej strony drzwi prostopadłościennym pojemnikiem, w którym znajdował się pomocniczy silnik spalinowy D-21M wraz z zbiornikiem paliwa i prądnicą. Początkowo planowano, że na postoju można go będzie odłączyć i umieścić w odległości nawet ok. 100 m od wozu, w celu lepszego maskowania w podczerwieni, co w praktyce okazało się niełatwe bez użycia dźwigu. Przeniesienie zespołu prądotwórczego do zewnętrznego zasobnika miało jednak niewątpliwe zalety. Po pierwsze znacząco się zwiększyła objętość użyteczna w kadłubie wozu dla załogi, co oczywiście polepszyło komfort pracy dla załogi. Po drugie, przesunął się do tyłu środek masy pojazdu – wcześniej były pewne problemy ze statecznością pojazdu podczas jazdy w trudniejszym terenie, który przecież na samym początku powstał jako wóz, który z tyłu kadłuba miał posiadać montowane wieże z całą ich aparaturą. Z takiej konieczności na wozach 1W12 z tyłu kadłuba był umieszczony balast. Oczywiście poważnym mankamentem zewnętrznego montażu zespołu prądotwórczego było pogorszenie walorów trakcyjnych – pojawiła się realna groźba zahaczenia zasobnikiem o nierówności terenu, szczególnie przy pokonywaniu stromych podjazdów.

Następne wersje to 2W12M-1 oraz 2W12M-2, w których zastosowano najnowocześniejsze posiadane ówcześnie środki łączności, zastosowano nowocześniejszy przyrząd transmisji komend typu APPK 1A30, a jako blok topodowiązania służy aparatura 1T28. Według pewnych informacji rosyjskich, przyrząd obserwacyjny NNDW, został zastąpiony nowszym rozwiązaniem – 1PN44M,m opracowanym dla systemu Reostat. W przypadku systemów serii „M”, mocnym wyróżnikiem jest wóz 1W16M-1, który jako jedyny nie posiada nieruchomej wieży. Także wozy serii 1W14 i 1W15, różnią się nieco od swoich poprzedników, gdyż została zmieniona obudowa lewego modułu aparatury optoleketronicznej na wieży.
System rodziny kompleksu 1W12 jest także stosowany w najnowszych rosyjskich 152 mm działach samobieżnych 2S19 Msta-S i można oczywiście przyjąć, że w służbie pozostaną jeszcze długo, choć już w Związku Radzieckim, w latach 80.-tych chciano w przyszłości zastąpić go nowszym wariantem, opracowanym na zunifikowanym podwoziu gąsienicowym, pochodzącym od bojowych wozów piechoty BMP-3 (Kapustnik-S). Obecnie gąsienicowe transportery MT-LB8u może produkować fabryka Muromtiepłowoz, a drugim źródłem zaopatrzenia są składy dużych nadwyżek sprzętu wojskowego, gdzie zgromadzono tysiące, często nawet nie używanych pojazdów pancernych, które miały być używane przez potężną Armię Radziecką. Oczywiście wśród nich są wozy rodziny MT-LBu.

Bibliografia
- Tomasz Szulc, Transportery MT-LBu, Cz. I – System “Maszyna”, Czasopismo Poligon Nr. 3/2008, Magnum-X
- Tomasz Szczerbicki, Pojazdy Ludowego Wojska Polskiego, VESPER, Wydanie I, 2014
- Tomasz Szczerbicki, Czołgi i samobieżne działa pancerne Wojska Polskiego 1919-2016, VESPER, Wydanie I, 2017
- Jerzy Kajetanowicz, Prace nad rozwojem sprzętu pancernego w Polsce-przegląd lat 1955–1990, „Poligon” 2010, nr 5
- Pojazdy Pancerne od “Little Willie” do Leoparda 2A6, Wydawnictwo AKA, Głuchołazy 2012
- https://de.wikipedia.org/wiki/MT-LBu