BTR-60 PU12
Kołowy transporter opancerzony BTR-60 PU12

Historia konstrukcji
Centralizacja i automatyzacja dowodzenia prowadzą do znaczącego wzrostu efektywności użycia sił i odpowiednich środków. Po raz pierwszy stwierdzono to dowodnie w przypadku obrony przeciwlotniczej w latach II Wojny Światowej, gdzie próby wykazały, że ta sama liczba baterii przeciwlotniczych dowodzona w sposób centralny, gwarantuje znacznie większą skuteczność w zwalczaniu sił powietrznych, niż w przypadku autonomicznego ich działania – samodzielnego wyszukiwania celów, śledzenia ich, określenia parametrów strzelań. Wraz z rozwojem środków wczesnego wykrywania i śledzenia, różnice między rezultatami działania autonomicznego i scentralizowanego stawały się jeszcze większe.
Dlatego nie trudno się dziwić, że szybko pojawiły się pomysły wprowadzenia podobnych rozwiązań w obronie przeciwlotniczej wojsk lądowych. Jednak praktyczna realizacja tego celu nie była prosta. Nawet zapewnienie niezawodnej łączności między dowodzącymi, a dowodzonymi było trudniejsze, niż w przypadku jednostek stacjonarnych, ulokowanych na przygotowanych pozycjach obrony przeciwlotniczej. Wraz ze wzrostem tempa działań problemem stało się także wypracowanie odpowiedniej decyzji i sformułowanie rozkazów dla podległych jednostek. Dowódca nie dysponował aktualnymi i kompletnymi informacjami o samym przeciwniku i wojskach własnych, podejmował decyzje, których przekształcenie przez sztab w rozkazy zajmowało zbyt wiele czasu. Nie było pewności, że zostaną na czas odebrane i właściwie wykonane.
Pierwsze zautomatyzowane systemy dowodzenia powstały w Stanach Zjednoczonych pod koniec lat 50.-tych XX wieku. W Związku Radzieckim na początku lat 60.-tych stworzono kilka wąsko wyspecjalizowanych, zautomatyzowanych systemów dowodzenia: dla wojsk strategicznych obrony przeciwlotniczej, lotnictwa oraz ostrzeganiem przez atakiem sił jądrowych przeciwnika. Nie były jednak ze sobą powiązane, a każdy był projektowany przez inną instytucję w oparciu o inną bazę sprzętową.
Zaplanowano także automatyzację dowodzenia obroną przeciwlotniczą wojsk lądowych. Z jednej strony namiastka takiej struktury już istniała, choć tylko na najniższym szczeblu, czyli baterii i dywizjonu artylerii przeciwlotniczej. Już w czasie trwania I Wojny Światowej zauważono, że obsługa armaty przeciwlotniczej nie jest sama w miarę precyzyjnie określić, jakie są prawidłowe parametry lotu celu i wyliczyć odpowiednio dobre kąty wyprzedzenia, wskutek czego samo strzelanie było wtedy mało skuteczne. Dlatego zaczęto też osobno konstruować odpowiednie przeliczniki balistyczne i zaopatrywać całe baterie w dalmierza artyleryjskie. Stworzono centralne kierowanie ogniem i dowodzenie, choć dane do strzelania były przekazywane głosowo, w postaci komend, wskutek czego działa musiały się znajdować bardzo blisko dalmierza i przelicznika. Skonstruowane w latach Ii Wojny Światowej stacje radiolokacyjne spowodowały wzrost odległości skutecznego wykrywania i śledzenia celów powietrznych oraz uniezależniło to obronę przeciwlotniczą od panujących warunków pogodowych. Ówczesne radary były jednak duże i często mocno skomplikowane, w związku z czym pojawiały się wówczas na szczeblu pułku, a zdobywane przez nie informacje o siłach powietrznych przeciwnika były drogą telefoniczną przekazywane do dywizjonów. Tutaj znaczącym postępem było wprowadzenie selsynowych mechanizmów nadążnych w konstrukcji armat przeciwlotniczych, dzięki czemu mogły być ona naprowadzane na cel zdalnie. Im bardziej była jednak była rozbudowana cała struktura dowodzenia, tym znacznie trudniej było ją wdrożyć w jednostkach obrony przeciwlotniczej wojsk lądowych, gdyż te były zmuszone do częstej zmiany stanowisk lub prowadzenia działania w rozproszeniu. Dlatego z jednej strony potrzebowały one uproszczenia struktur dowodzenia, a z drugiej – znacznego zwiększenia ich niezawodności oraz przyśpieszenia przepływu informacji.
Pierwszym radzieckim kompleksem środków dowodzenia (jeszcze nie zautomatyzowanych) pułkiem artylerii przeciwlotniczej stał się KUZA-1 Triton, który został zaprojektowany w 1947 roku w biurze OKB-569 i przyjęty na uzbrojenie w 1953 roku. Składał się on ze stanowiska dowodzenia pułku i punktów dowodzenia dywizjonów. Na szczeblu pułku funkcjonowała radiolokacyjna stacja obserwacji okrężnej P-10. Wszystkie komponenty kompleksu były rozmieszczone albo w furgonach samochodów ciężarowych ZiS-151, albo w przyczepach przystosowanych do pracy w schronach-garażach. Informacje podawane o celach były obrazowane na przenośnym monitorze stacji radiolokacyjnej, umieszczonym na stanowisku dowodzenia pułku, dane o nich przetwarzano i w postaci komend oraz współrzędnych celów przekazywano do dywizjonów. Na ich podstawie kierowano w stronę celów stacje kierowania armatami typu SON. W punktach dowodzenia funkcjonowały specjalne tablice zobrazowania informacji o celach oraz planszety z ręcznie nanoszonymi informacjami.
Funkcjonowanie KUZA uznano wówczas za poprawne i zarządzono opracowanie zautomatyzowanego kompleksu dowodzenia o podobnych funkcjach. Istotne było także rozszerzenie zakresu możliwości jego zastosowania o kompleksy rakietowe, choć takich jednostki wojsk lądowych jeszcze wówczas nie posiadały. Prace nad nimi rozpoczęto w OKB-563 w 1957 roku i przyjęto go na uzbrojenie w 1961 roku jako 9S44 Krab K-1. Kompleks ten składał się z mobilnego punktu dowodzenia pułku (kabiny kierowania bojowego KBU) 9S416 oraz punktów dowodzenia baterii (kabin odbioru wskazań KPC) 9S417. Kompleks współpracował ze stacjami radiolokacyjnymi obserwacji okrężnej: P-10, P-12 i P-40 oraz wykrywającymi cele nisko latające P-15 oraz wysokościomierzem PRW. Mógł on równocześnie przekazywać informacje o 10 celach ze pomocą wąskopasmowej linii transmisji obrazu radiolokacyjnego Sietka-2K. Umożliwiał on dowodzenie pułkami artylerii, dywizjonami rakietowymi uzbrojonymi w S-75, pułkami rakiet (samobieżnych) Kub i dywizjonami samobieżnych Krug. Wzrost efektywności jednostek dowodzonych przez K-1, oceniano na 20%, a spadek zużycia rakiet kierowanych na 30%-50%.

Łącznie dalszy postęp miało zapewnić wdrożenie specjalnej wersji zautomatyzowanego systemu dowodzenia pułkami rakietowymi obrony powietrznej Wozduch-1P. Funkcjonował on na stanowiskach dowodzenia obroną przeciwlotniczą armii, brygad rakiet Krug i pułków rakiet S-75. System odbierał w trybie półautomatycznym, informacje o 30 celach na minutę, przekazywał automatycznie drogą radiową lub przewodową przetworzone informacje o celach do jednostek podporządkowanych w tempie do 2 na minutę. Problem stanowił długi czas rozwijania i komplikacja stanowisk tego systemu. Niezależnie od tego Wozduch-1P przyjęto na uzbrojenie wojsk lądowych w 1964 roku.
Powstanie PU-12
W połowie lat 60.-tych XX wieku radzieccy wojskowi mogli już wysnuć pierwsze wnioski z prowadzenia eksploatacji kompleksów dowodzenia obroną przeciwlotniczą wojsk lądowych. Było jasne, że wysoki poziom automatyzacji zwiększa znacząco możliwości dostępnych środków ogniowych, a główny problem stanowią: nadmierny poziom komplikacji systemów zautomatyzowanych i stanowczo duże rozmiary furgonów z całą, specjalistyczną aparaturą. Z tych powodów automatyzację realizowano od dywizjonów wzwyż, podczas gdy znaczna większość przeciwlotniczych środków ogniowych wojsk lądowych była zgrupowana w samodzielnych bateriach (na szczeblu pułku pancernego i zmechanizowanego). Brak najniższego szczebla w zautomatyzowanych systemach dowodzenia zmniejszał też znacząco efektywność już wdrożonych kompleksów i systemów.
W wyniku przeprowadzonych analiz w 1966 roku zarządzono opracowanie zautomatyzowanego punktu dowodzenia dla baterii przeciwlotniczej, zdolnego do dowodzenia w ruchu. Nośnikiem punktu,dla zapewnienia baterii odpowiedniej ruchliwości w terenie, miał być transporter opancerzony. Już rok później odbyły się próby poligonowe, co skłania do przypuszczeń, że w rzeczywistości prace konstrukcyjne podjęto kilka lat przed ich oficjalnym usankcjonowaniem. Wyniki przeprowadzonych prób były dobre i Komisja Głównego Zarządu Artylerii zaleciała przyjęcie punktu dowodzenia na uzbrojenie pod oznaczeniem PU-10, co nastąpiło rozkazem nr 095 ministra obrony w 1968 roku. W wozie znalazła się część odbiorcza aparatury transmisji danych Sietka-2K z monitorem Strieła-W, pulpit optycznej sygnalizacji gotowości środków ogniowych baterii przeciwlotniczych, planszet oraz środków łączności, czyli znaczna część komponentów kompleksu Krab. Całość zainstalowano podobno w przedziale bojowym transportera gąsienicowego MJT-LBu. Jest to jednak bardzo mało prawdopodobne, gdyż ten pojazd, inaczej „Izdielie-10”, ostał przyjęty dopiero w 1970 roku, a produkcję seryjną podjęto dopiero dwa lata później. Gdy rozpoczynano przeprowadzanie prób technicznych, a następnie poligonowych PU-10, nie był gotowy nawet pierwszy prototyp wozu MT-LBu. Można więc założyć, że miał być to docelowy nośnik, a całą aparaturę testowano na starszym pojeździe gąsienicowym.
Podczas tych prób stwierdzono, że przy wykorzystaniu monitora maksymalny błąd określenia współrzędnych wynosi w odległości 3 km i w azymucie 5 stopni. Przy wykorzystaniu planszetu dokładność określano na odpowiednio 5 km i 20 stopni. Maksymalna odległość pomiędzy stanowiskiem dowodzenia baterii i stanowiskiem dowodzenia baterii i stanowiskiem dowodzenia obrony przeciwlotniczej pułku, na którym znajdowała się stacja radiolokacyjna nie mogła przekraczać 20 km. Czas rozwinięcia stanowiska z podłączeniem 4 linii łączności przewodowej na odległość 500 m wynosił 18 minut. Z bardzo niejasnych przyczyn PU-10 nie został skierowany do produkcji seryjnej.
Zamiast wdrażać wóz PU-10, zlecono opracowanie mobilnego punktu dowodzenia PU-12. Jego głównym konstruktorem został O. Parchomienko. Próby poligonowe przeprowadzono w 1971 roku i w następnym roku został on przyjęty do służby na stan armii, jako punkt dowodzenia pułkowych baterii obrony przeciwlotniczej, gdzie znajdowały się mobilne zestawy artyleryjskie: lufowe ZSU-23-4 i rakietowe Strzała-1 (S-1). Nadano mu oznaczenie 9S482. W 1973 roku rozpoczęto próby poligonowe PU-12 jako stanowisko dowodzenia szefa obrony przeciwlotniczej pułku i dywizji, a rok później oficjalnie poszerzono jego funkcje o dwa zastosowania.
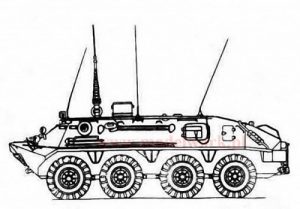
Konstrukcja wozu
Nośnikiem dla PU-12 był standardowy kołowy transporter opancerzony Armii Radzieckiej BTR-60PB. Zdemontowano pierścień wiodący wieży, a pozostały po nim otwór w stropie zasłonięto arkuszem blachy pancernej. Na górnym pancerzu zamontowano pionowo cylindryczny pojemnik dla teleskopowego masztu o maksymalnej wysokości 6000 mm, a na burtach pojawiły się skrzynki z wyposażeniem. W ten sposób wóz upodobnił się do innych pojazdów dowodzenia i łączności produkowanych na bazie wozu BTR-60. W ramach dostosowania do nowych zadań w wozie zamontowano dwa dodatkowe akumulatory i dodatkowy alternator na silniku. Do zasilania aparatury na postoju służył agregat typu AB-1-P/30 o mocy 1 kW, przewożony na górnym pancerzu w metalowym pudle. Załogę wozu ograniczono do 5 żołnierzy. Tworzyli ją: dowódca baterii/pułku, dowódca wozu, łącznościowiec, planszecista i kierowca.
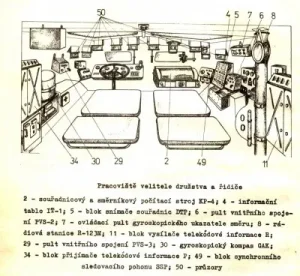
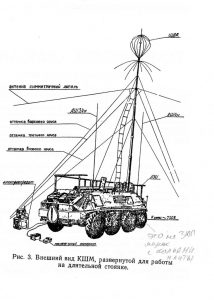
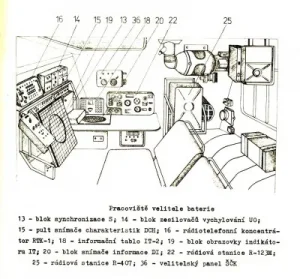
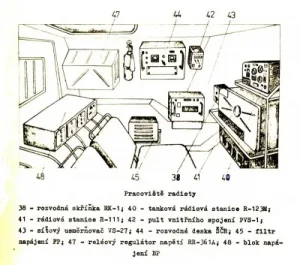
Zastosowano wyposażenie zbliżone do wybranego dla PU-10. Zamiast Sietki w pojazdach zamontowano aparaturę transmisji danych ASPD-12, przetwarzającą dane o celach odległych do 100 km od stacji radiolokacyjnej, stanowiący centralny punkt systemu. Aparatura ASPD-12 składała się z: nadajnika informacji teleskopowej (blok R), odbiornika informacji (Blok P), synchronizatora (Blok S), napędu synchronicznego (Blok SSP), wskaźnika/monitora (Blok IT czyli „indikatornaja truba”), wzmacniacza wychyleń UO, bloku odbioru współrzędnych geograficznych DTP i „myszy” pantograficznej DI. Oprócz tego w wozie zastosowano radiostacje typu R-111, R-123M (3 sztuki) i R-407. W marszu wykorzystywały one anteny prętowe, a na postoju rozwijano maszt teleskopowy z przymocowanymi do niego antenami. Maszt o wysokości 6000 mm był unoszony i opuszczany za pomocą korby obsługiwanej z wnętrza przedziału. U nasady zewnętrznej części pojemnika masztu zamocowano szpulę z przewodem wielożyłowym lub przewodami telefonicznymi.
Dodatkowe wyposażenie stanowił żyroskopowy wskaźnik kursu GAK (1G13M), przelicznik współrzędnych (kursograf) KP-4, busola artyleryjska PAB-2, dalmierz IT25 lub przyrząd obserwacyjuny TZK i dwa panele informacyjne IT służące do zobrazowania informacji o gotowości ogniowej wozów, zapasu amunicji, itp. Dowódca wozu dysponował panelem IT-1,m dowódca podziału IT-2. Planszet ustawiano między stanowiskami łącznościowca (umiejscowionego z lewej burty wozu) i dowódcy (z prawej burty wozu) – komunikacja po między tylną, a przednią (kierowca, dowódca wozu) częścią przedziału bojowego była wtedy utrudniona.
Źródłem informacji o celach mogły być radiolokatory typu P-12, P-18, P-40, P-15 i P-19. Okazało się jednak, że nie wszystkie te stacje radiolokacyjne równie łatwo i niezawodnie transmitują swoje dane do punktu dowodzenia PU-12. Na największe problemy napotkano zautomatyzowane przekazywanie informacji ze stacji P-12. W praktyce na szczeblu dywizji, a czasami i pułku, wóz dowodzenia wspomagano komponentami systemu Wozduch-1P zamontowanymi w furgonach samochodów ciężarowych. To one przyjmowały informacje o celach od stacji radiolokacyjnych i wstępnie je przetwarzały, a PU-12 jedynie je dystrybuował do baterii obrony przeciwlotniczej. Najlepiej PU-12 współpracował natomiast ze stacją PPRU-1 Owod, która jednak sama była równocześnie stanowiskiem dowodzenia i funkcjonuje na szczeblu pułku, czyli mogła sama koordynować działania punktów dowodzenia baterii.
W latach 1975-1978 dokonano modernizacji wozów PU-12. Jego głównym celem było dostosowanie wozu do dowodzenia bateriami i pułkiem wyrzutni pocisków rakietowych kompleksu Osa. Zmodernizowany wóz został przyjęty na uzbrojenie wojska w 1978 roku jako PU-12M (9S482M). Otrzymał on unowocześnioną aparaturę ASPD-U, na której ekranie było obrazowanych do 99 celów – ich numery, wektory prędkości, pułap lotu i przyporządkowane celom rozkazy. Podział urządzenia na bloki był inny niż w wersji oryginalnej. Był to: moduł nadawczo-odbiorczy RPS-M, bloki DH, DT-2, FR, S23-1. Także wskaźnik (monitor) zmodernizowano i zmieniono oznaczenia na IT-45M. Maksymalny błąd określenia współrzędnych zmniejszył się odpowiednio do 800 m i 1 stopnia. Czas wypracowania odpowiedniej decyzji dotyczących nowego celu skrócił się do 3-5 sekund. Poprawiono także ergonomię stanowisk, główny monitor IT przesunięto do góry, nad nim zamontowano panel IT-2 (wcześniej znajdował się na burcie wozu i dowódca musiał odwracać głowę od monitora, by nań spojrzeć).
Wprowadzono także szereg drobniejszych zmian konstrukcyjnych, zarówno w wozach nowych, jak i wozach starszych, które poddawano remontowi kapitalnemu. Wskutek tego pojawiło się co najmniej kilka konfiguracji PU-12M, różniących się od siebie m.in. rozmieszczeniem aparatury wewnątrz wozu. Interesującym szczegółem jest obecność dodatkowej strzelnicy, o typowej dla wozów kołowych BTR-60 konstrukcji, umieszczonym w przednim pancerzu między oknami. Nie posiadają jej PU-12 oraz starsze PU-12M. Część wozów otrzymała także identyczną strzelnicę w prawym włazie bocznym.
Następna, znacznie głębsza modernizacja wozów PU-12M nastąpiła w latach 80.-tych XX wieku i w jej wyniku powstał wóz PU-12M6 (brak jest informacji o wozach w wersji M2 do M5),l ale jako nośnik wykorzystujący kołowe transportery opancerzone BTR-80, a konkretniej jego wersję z powiększonym przedziałem bojowym K1Sz1 Kuszetka. Na tym samym kołowym nośniku opracowano PU-12M7, który różnił się od swojego poprzednika m.in. możliwością automatycznej wymiany informacji z wozami bojowymi Tor-M i Tunguska-M, cyfowymi radiolokatorami oraz wozami dowodzenia wyższego szczebla, m.in. systemu zbioru i obróbki informacji radiolokacyjnej Pori-P2M.
Wozy z bazą PU-12 były produkowane w Radiozawodie (fabryka aparatury radiowej) w Penzie.
Eksport PU-12
W 1975 roku wozy z bazą PU-12 zostały dopuszczone do eksportu dla krajów sojuszniczych, a cztery lata później zezwolono na eksport wariantu PU-12M. Wszystko wskazuje na to, że pierwszymi odbiorcami tego typu były jednostki Niemieckiej Republiki Demokratycznej (od 1976 roku) i Czechosłowacja, nieco później Bułgaria, Węgry, Polska, Rumunia i Jugosławia. W latach 80.-tych XX wieku krąg importerów rozszerzył się o niektóre kraje arabskie (Irak, Syria, Libia, Algieria), Wietnam i kilka innych. Systemy łączności i dowodzenia były i są traktowane jako szczególnie tajne i dlatego na ich temat publikuje się niewiele informacji. Także podczas ćwiczeń poligonowych wozy PU-12 były bardzo rzadko fotografowane, a o ich możliwościach i roli w strukturach dowodzenia nie pisano nic. Nawet dzisiaj, ponad ćwierć wieku po rozwiązaniu Układu Warszawskiego, bardzo trudno znaleźć sprawdzone informacje na ich temat. Nieco więcej wiadomo na temat funkcjonowania wozów PU-12 w strukturach jednostek armii Czechosłowacji i Niemieckiej Republiki Demokratycznej.
Liczba wozów tego typu była w wojskach wschodnich Niemiec dość spora, ostatnich 12 maszyn dostarczono w 1988 roku, zwiększając ich łączną liczbę do 83 maszyn. Przewidywano, e będą z nich korzystać dowódcy obrony przeciwlotniczej nawet najwyższego szczebla – na poziomie dowództwa wojsk lądowych oraz dowództw armii (okręgów wojskowych). Na tych stanowiskach miały być wykorzystywane po dwa wozy PU-12M – przeznaczone dla dowódcy i jego szefa sztabu. Ponieważ radzieckie regulaminy nie przewidywały takiego typu rozwiązania, wszystkie stosowane wozy PU-12 były identyczne, co nie ułatwiało samego podziału funkcji. Można domniemywać, że w jednostkach armii NVA (Nationale Volksarmee) dokonała odpowiednich modernizacji własnymi siłami. Niezależnie od podwojenia liczby wozów na stanowisku dowodzenia, PU-12 miały zbyt małe możliwości zobrazowania i przetwarzania danych dla tak wysokiego szczebla.
W siłach zbrojnych Czechosłowacji – CSLA (Ceskoslovenska Lidova Armada), wozów PU-12M miało być jeszcze więcej. Według przypisanego etatu w każdej dywizji miało być ich od 22 sztuk do 29 sztuk. Był oto spowodowane za sprawą istnienia kompanii przeciwlotniczej w każdym batalionie, czego nie było w innych armiach państw – członków Układu Warszawskiego. Oznacza to, że siły CSLA powinny posiadać ponad 200 wozów tego typu na swoim stanie. Jednak w rzeczywistości było ich znacznie mniej, gdyż stany etatowe nigdy nie zostały osiągnięte.

W Europie, poza tymi republikami radzieckimi, wozy PU-12M pozostają w czynnej służbie w Bułgarii i niektórych krajach, które powstały po rozpadzie dawnej Jugosławii – Serbia, Czarnogóra, Macedonia). W tych ostatnich zostały znacząco zmodernizowane zamontowane środki łączności, zastępując m.in.: klasyczne łącza przewodowe – nowymi światłowodami.
Zupełnie odmienna sytuacja panowała w Polsce, gdzie już w latach 60.-tych, kiedy przyjęto na stan wozy dowodzenia obroną przeciwlotniczą Rekin na nośnikach samochodowych, a pod koniec dekady opracowano pojazd SKOT R-6 jako wóz dowodzenia baterii przeciwlotniczej. W związku z powyższym, oraz ze względów ekonomicznych zrezygnowano z zakupów kompletu PU-12 dla dywizji, a później nawet dla pułków zestawów Os.
Niezależnie od tego do Polski trafiło jednak kilka zestawów PU-12. Być może wozy te zostały dostarczone wraz z bateriami wozów Strzała-1, a może trafiły do nas w celach zapoznawczych – wtedy znalazły się w instytucjach naukowych i szkoleniowych: Szkole Oficerskiej Obrony Przeciwlotniczej w Koszalinie, być może też w WAT. Gdy tylko Polska kupiła pierwsze zestawy Osy, wozy zostały skierowane do ich pułków. Być może miało to być rozwiązanie przejściowe zanim do współpracy z wyrzutniami 9A33 przystosowano polskie Rekiny. Na pewno jeden taki pojazd został przekazany do 4. Pułku Przeciwlotniczego w Czerwińsku, zapewne do Szkoły w Koszalinie. Pełnił funkcje wozu dowodzenia dowódcy pułku, choć podobno był to starszy wariant wozu PU-12, mimo że jego dokumentacja (dostarczona wraz z radzieckimi Osami?) dotyczyła Pu-12M. Jego użytkowanie było poważnie utrudnione, gdyż na szczeblu dywizji nie było odpowiedniego sprzętu kompatybilnego z PU-12, a więc nie można było przekazać doń informacji o celach z pomocą ASPD. Ponieważ nie było też ASPD w bateriach przeciwlotniczych, pozostała więc bardzo prymitywna metoda przekazywania danych o celach powietrznych drogą radiową.

Polskie wozy PU-12 były podobno poddane lokalnie modernizacji – miały być w wozach zamontowane dwa pół-komplety radiolinii, które umożliwiały łączność z Rekinami, które funkcjonowały jako wozy dowódców baterii. Podobno z czasem zdemontowano teleskopowe maszty antenowe, a na pewno nie ma go jedyny zachowany pojazd tego typu (być może zastąpiły je polskie maszty o podobnych możliwościach, ale lżejszej konstrukcji). Na dodatek bardzo ciasne i niewygodne wnętrze wozu, nazywanego potocznie PU-szką, sam pojazd nie zyskał uznania wśród polskich dowódców wojskowych, którzy zdecydowanie preferowali bardziej komfortowe, choć z wyglądu „mniej” bojowe Rekiny. Niezależnie od tego wóz z Czerwińska co najmniej kilkakrotnie uczestniczył w strzelaniach pułku zanim został przeniesiony do rezerwy, a następnie przekazany do Agencji Mienia Wojskowego. Obecnie, niestety bez wyposażenia wewnętrznego, wóz ten w niedobrym stanie można oglądać w Lubuskim Muzeum Wojskowym.
Ocena konstrukcji
Zestaw PU-12 był udanym wozem dowodzenia baterią przeciwlotniczą, PU-12M dysponował możliwościami automatycznej transmisji danych do poszczególnych wozów bojowych niektórych typów, co poważnie skracało czas i zwiększało skuteczność wskazywania celów. Pojazd sprawdzał się gorzej jako punkt dowodzenia szefa obrony przeciwlotniczej pułku, a tym dywizji. Największą słabością wozów PU-12 był brak własnej, choć niewielkiej stacji radiolokacyjnej, dzięki, której byłby niezależny od informacji o celach pochodzących ze źródeł zewnętrznych.
Rezygnacja z jego szerokiego wdrożenia w jednostkach Wojska Polskiego miała najwyraźniej podłożę ekonomiczne, a nie organizacyjno-bojowe: krajowy sprzęt o podobnym przeznaczeniu był bowiem znacznie mniej nowoczesny i mniej perspektywiczny, gdyż nie podjęto na nim nawet próby automatyzacji transmisji danych. Zapewne najlepszym rozwiązaniem byłoby rozmieszczenie radzieckiej aparatury, pochodzącej z PU-12M na polskich nośnikach, głównie transporterach SKOT, co obniżyło by cenę i stworzyło by lepsze warunki pracy dla załogi wozu.

Z dzisiejszego punktu widzenia możliwości PU-12, szczególnie w zakresie przetwarzania danych były wprawdzie bardzo ograniczone, ale warto pamiętać, że w latach, gdy cały system powstawał, ten wóz dowodzenia był wpajany do struktur wojskowych – mikroelektronika dopiero zaczynała raczkować.
Podstawowe dane taktyczno-techniczne
-
Masa wozu – 10 400 kg
-
Długość wozu – 7220 mm
-
Szerokość wozu – 2825 mm
-
Wysokość wozy – 3357 mm
-
Wysokość wozu do stropu kadłuba – 2055 mm
-
Prześwit kadłuba – 475 mm
-
Napęd wozu – dwa silniki gaźnikowe GAZ-49B 2 x 66 kW
-
Prędkość maksymalna na drodze – do 80 km/h
-
Prędkość pływania – do 10,4 km/h
-
Promień skrętu – 12 000 mm
-
Zasięg maksymalny – do 400 km
-
Załoga – pięciu żołnierzy
-
Gwarantowany zasięg radiostacji:
-
R-407 – do 15 km
-
R-123M – do 20 km
-
R-111 – do 30 km












Autor – zdjęcia: Dawid Kalka
Drzonów, Lubuskie Muzeum Wojskowe
Eksponat muzealny
Bibliografia